AMEZING77
[TOC]
计算机视觉
- 创建时间: 2025年03月02日 10:50
- Tag: Wpsbook
数字图像处理(第四版)
绪论
- 根据光子能量排列的电磁波谱

- 伽马射线成像,注入放射性同位素,衰变时发射正电子,与电子碰撞发射两束伽马射线,通过断层成像;
- X射线成像,对带有阴阳极的真空管进行阴极加热,释放自由电子告诉流向阳极,碰撞原子核,释放X射线,通过吸收X射线强度重建图像;
OpenCV4.5 计算机视觉开发实战 基于python
计算机视觉概述
图像的基本概念
- 像素(Pixel)
- 图像的最小单位,每个像素包含颜色信息;
- 图像分辨率(Resolution)
- 图像的分辨率指的是图像在水平和垂直方向上的像素数量;
- 屏幕分辨率(Screen Resolution)
- 屏幕分辨率指的是屏幕上水平和垂直方向上的像素数量;
- 灰度
- 灰度图像的每个像素值介于0到255之间,表示从黑到白的亮度;
- 灰度级
- 灰度级指的是图像中不同的亮度级别数量;
- 有时把最大灰度级数称为灰阶(Gray Levels);
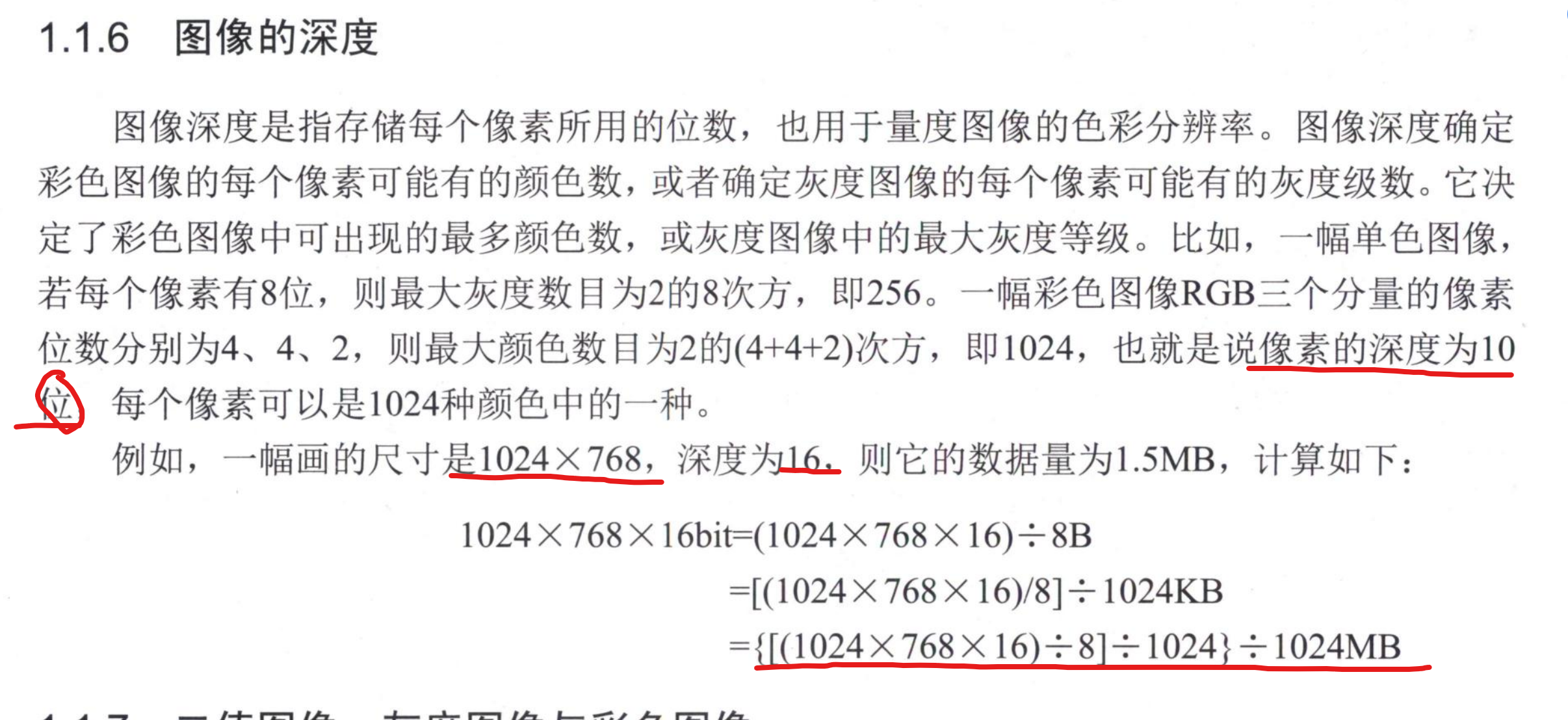
- 深度
- 图像的深度指的是每个像素能存储的颜色通道数;
- 计算一个相机单次采集的数据量,分辨率*深度;
- 1MB=1024KB,1KB=1024Byte,1Byte=8bit;
- 二值图像
- 二值图像的每个像素只能是0或1,表示黑和白,用1bit存储;
- 灰度图像 Gray Scale Image
- 灰度图像的每个像素值介于0到255之间,表示从黑到白的亮度;
- 灰度图像只包含一个通道的信息
- 彩色图像 RGB Image
- 彩色图像的每个像素包含三个颜色通道,分别是红色、绿色和蓝色,从0到255之间;
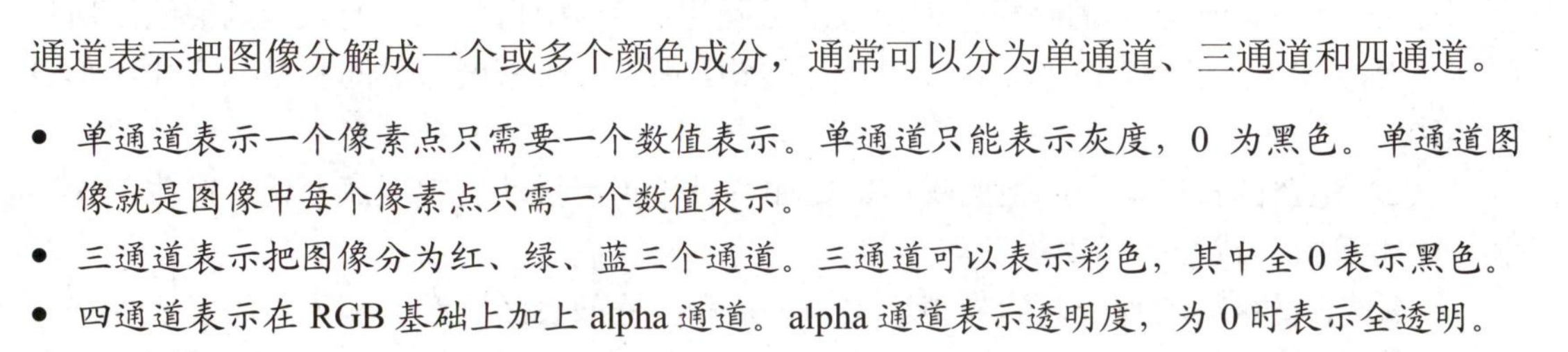
- 通道
图像噪声
- 噪声种类
- 高斯噪声、瑞利噪声、伽马噪声、脉冲噪声等;
- 脉冲噪声也叫椒盐噪声,是图像中最常见的一种噪声;
- 噪声来源
- 外部噪声,主要是电气设备的干扰、天体干扰等;
- 内部噪声,主要是传感器本身的噪声(电源电压不稳、物理抖动、元器件缺陷)
- 图像滤波
- 经典平滑滤波方法,对单像素及其局部并行处理,计算效率高;
- 灰度图像滤波,线性滤波器、非线性滤波器;
- 线性滤波器:均值滤波、高斯滤波;在平滑的同时,会丢失图像的边缘信息;
- 非线性滤波器:中值滤波、双边滤波;相对于线性滤波器,可以较好地保持图像的边缘信息;但是是全局滤波,对于未存在噪声的部分会造成模糊;
图像处理
- 图像处理常用方法:
- 图像变化,图像编码压缩、图像增强、图像复原、图像分割、图像分类、图像重建等;
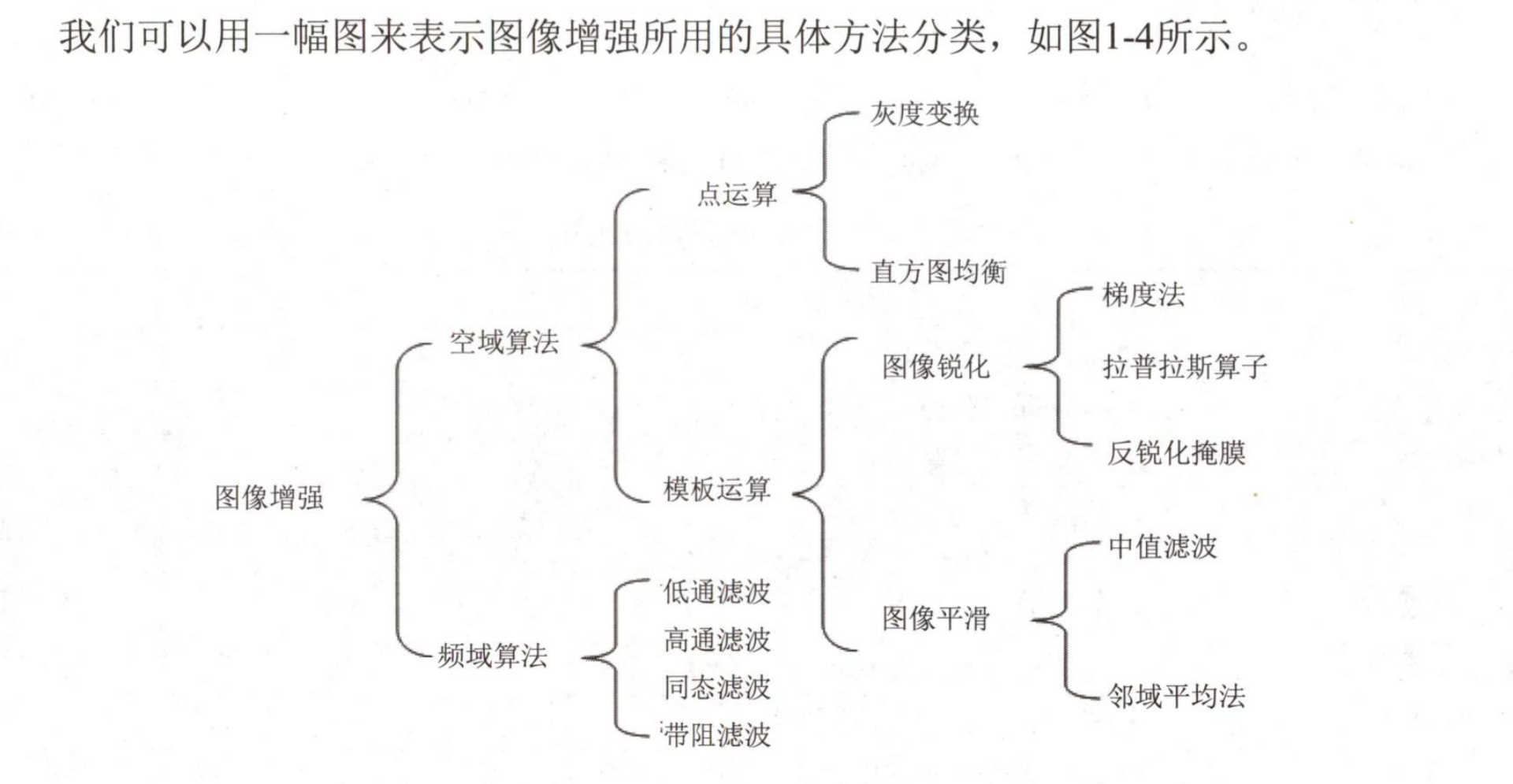
- 图像增强
- 图像增强是提高图像质量的过程,包括对比度调整、锐化等,目的是为了去除采集国过程中的噪声或提取感兴趣的区域;
- 图像增强是提高图像质量的过程,包括对比度调整、锐化等,目的是为了去除采集国过程中的噪声或提取感兴趣的区域;
- 图像分割
- 图像分割是提取有意义的图像特征,如边缘、区域等
OpenCV基本操作
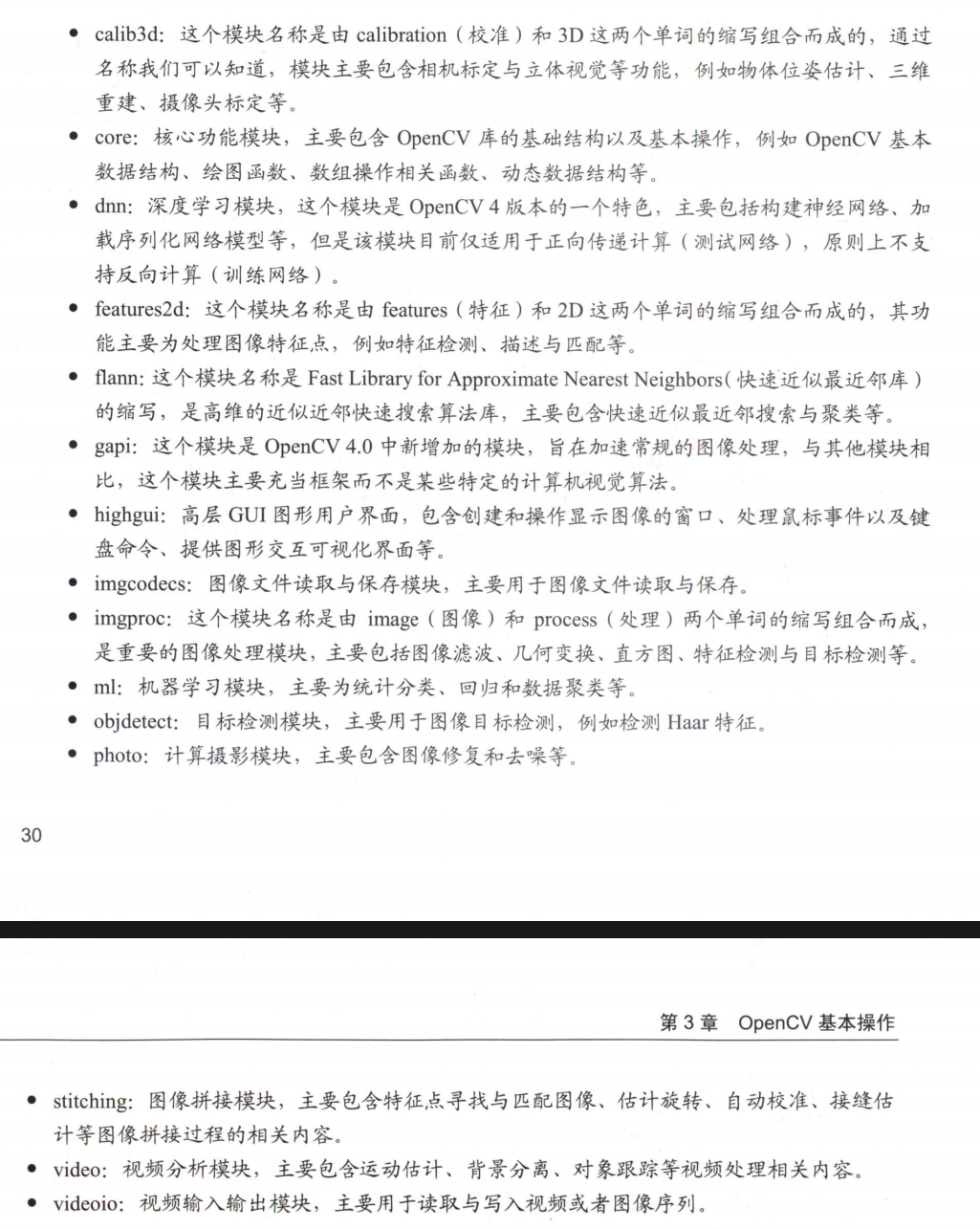
- 架构
图像输入输出
- 读取图像
cv.imread()- 支持相对路径和绝对路径,建议使用’/’
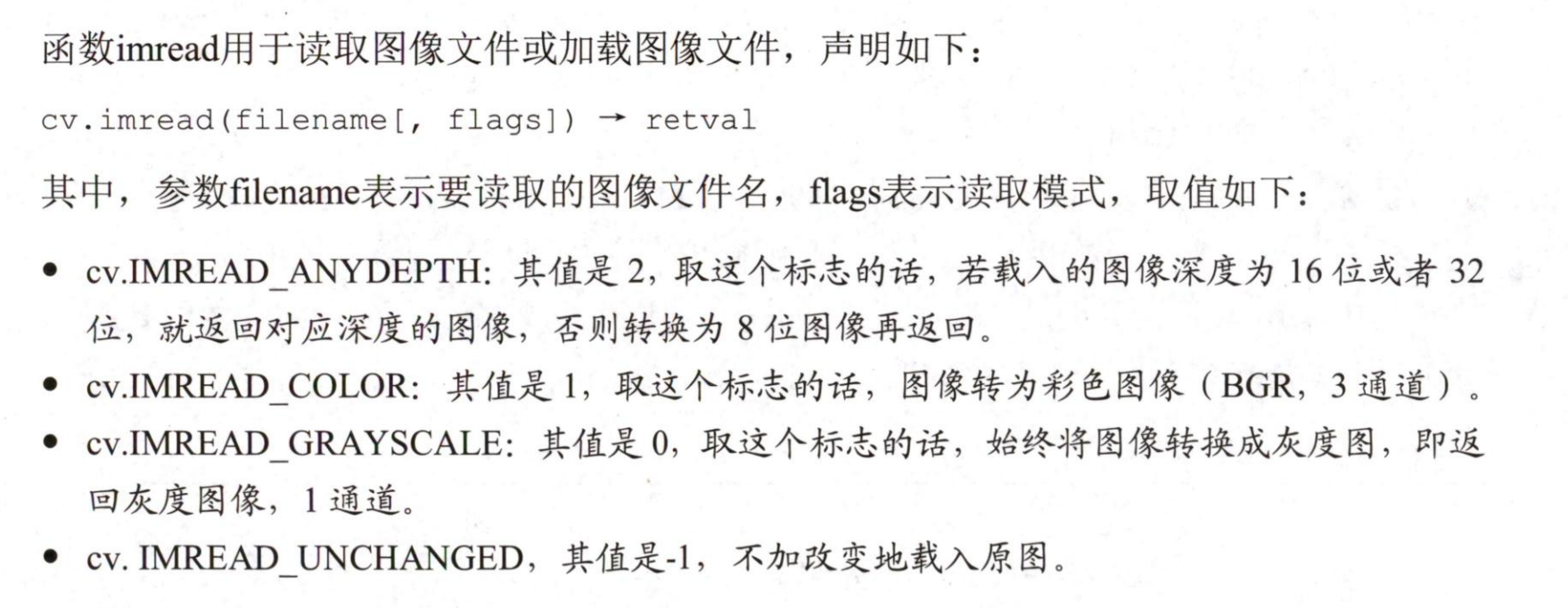
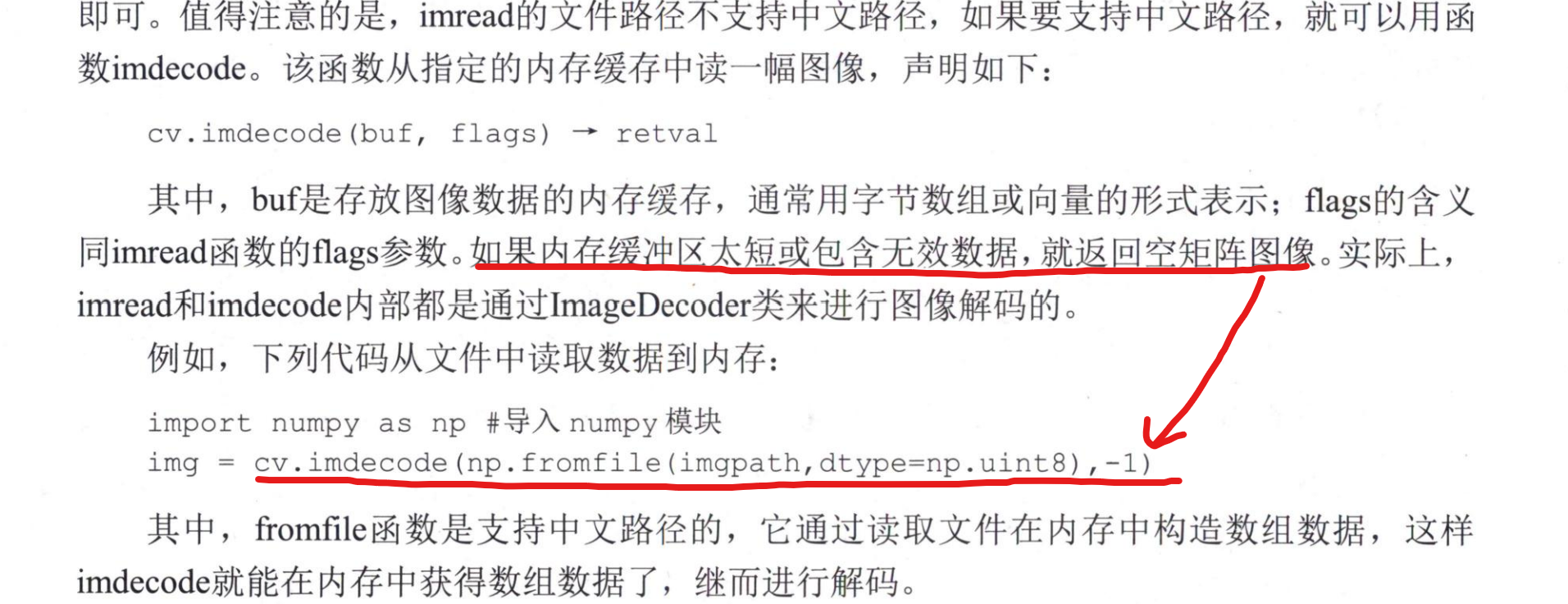
- 读取中文路径
- 获取图像的宽高
height = np.shape(img)[0] width = np.shape(img)[1] channels = np.shape(img)[2] - 显示图片
cv.imshow(filename,img) - 保存图片
cv.imwrite(filename,img) - 创建窗口
cv.namedWindow(windowname)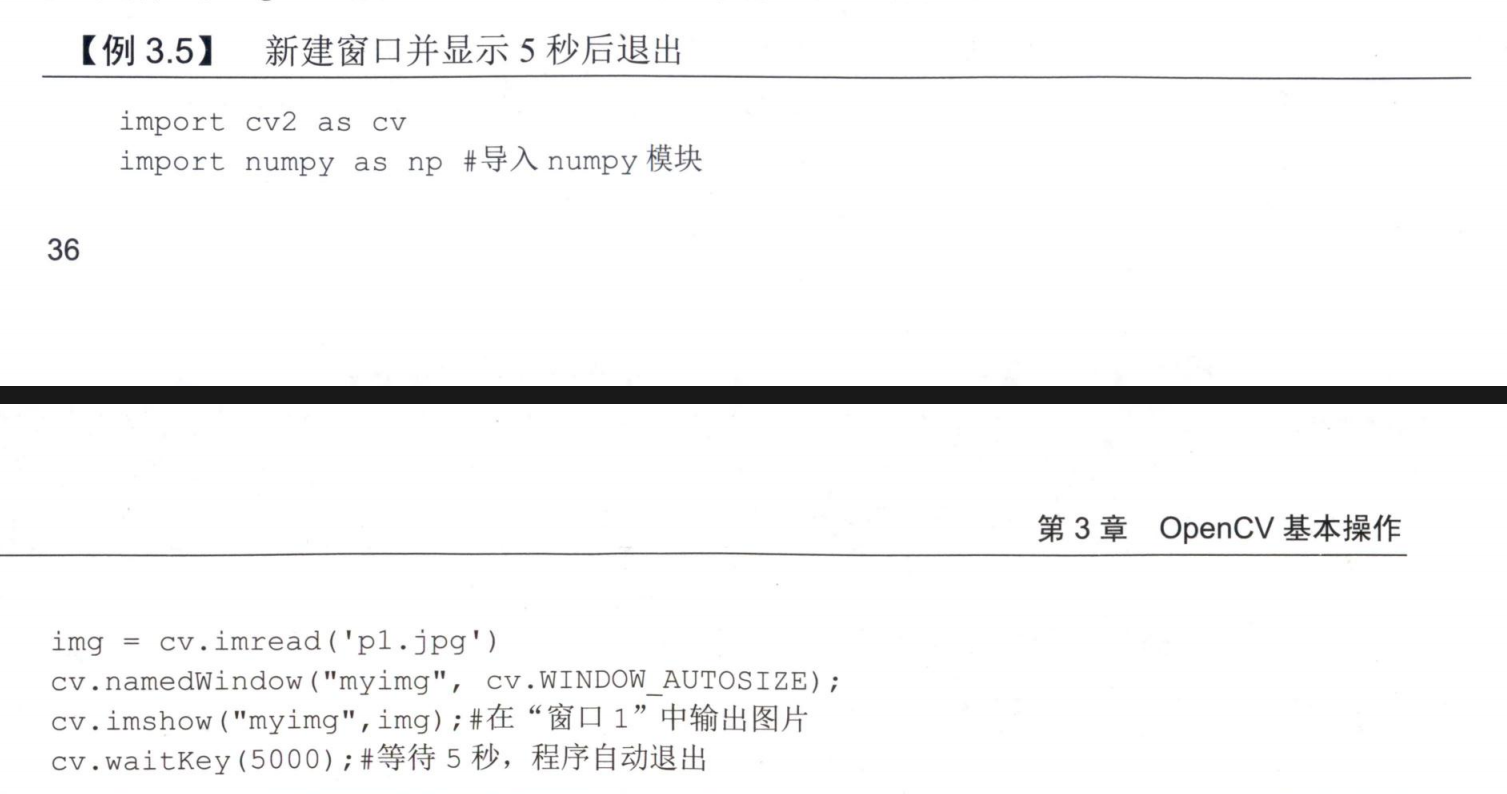
- 单窗口多图显示
cv.hstack(tuple(img1,img2,img3))- 将多个图像横向拼接起来显示,高度shape[0]必须相同;
- 调整窗口大小
cv.resizeWindow(windowname,width,height)- 注意创建窗口时flag=cv.WINDOW_NORMAL;
- 销毁窗口
cv.destroyAllWindows(windowname) - 鼠标事件
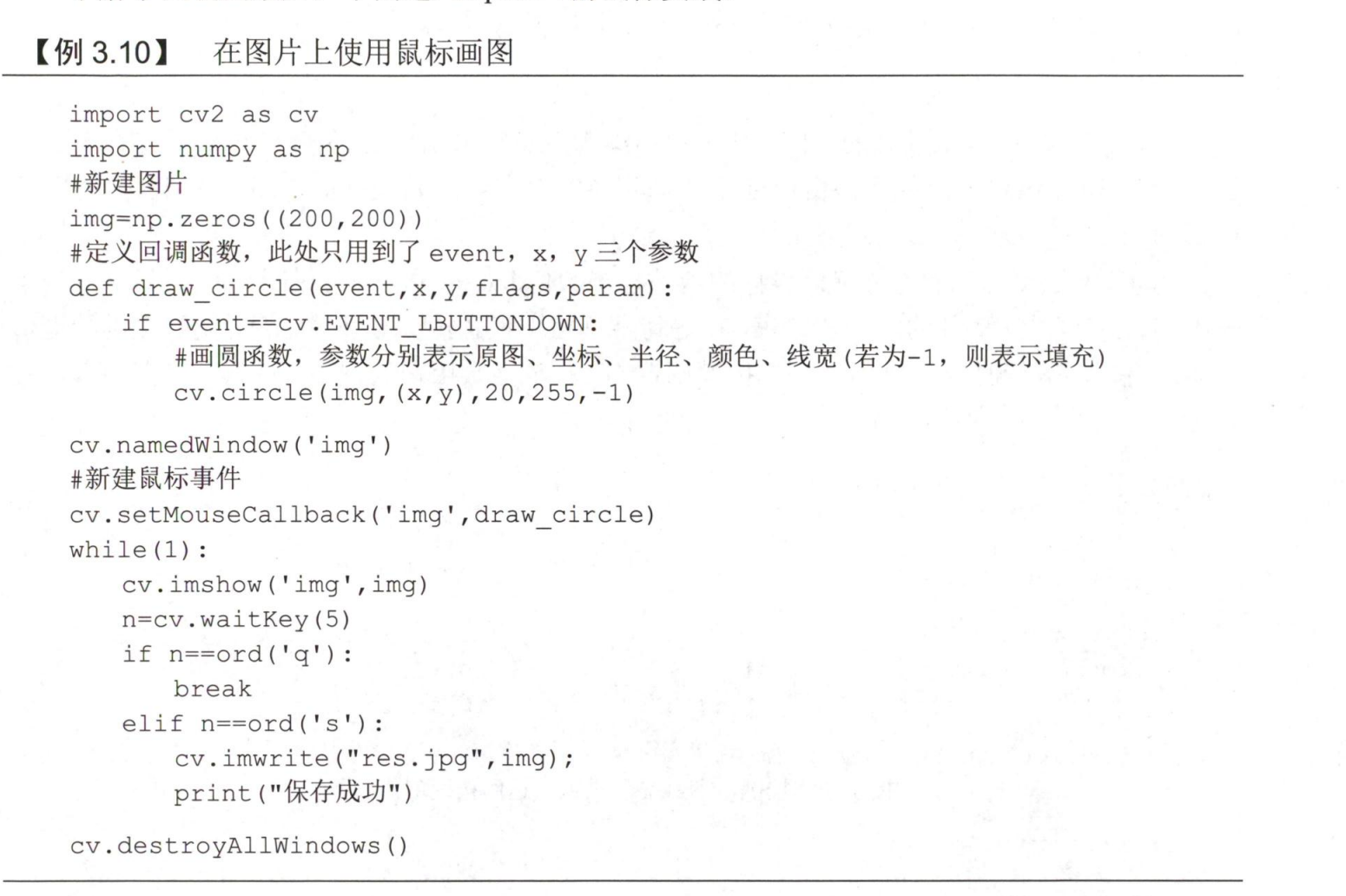
- 键盘事件
- 滑动条事件
图像处理模块
颜色变换
- 常见的几种颜色转换
- 灰度图
- 将黑色和白色转换为256个灰阶,灰度值介于0到255之间;
- 二值图
- 将图像转换为二值图,只有黑白两种颜色;
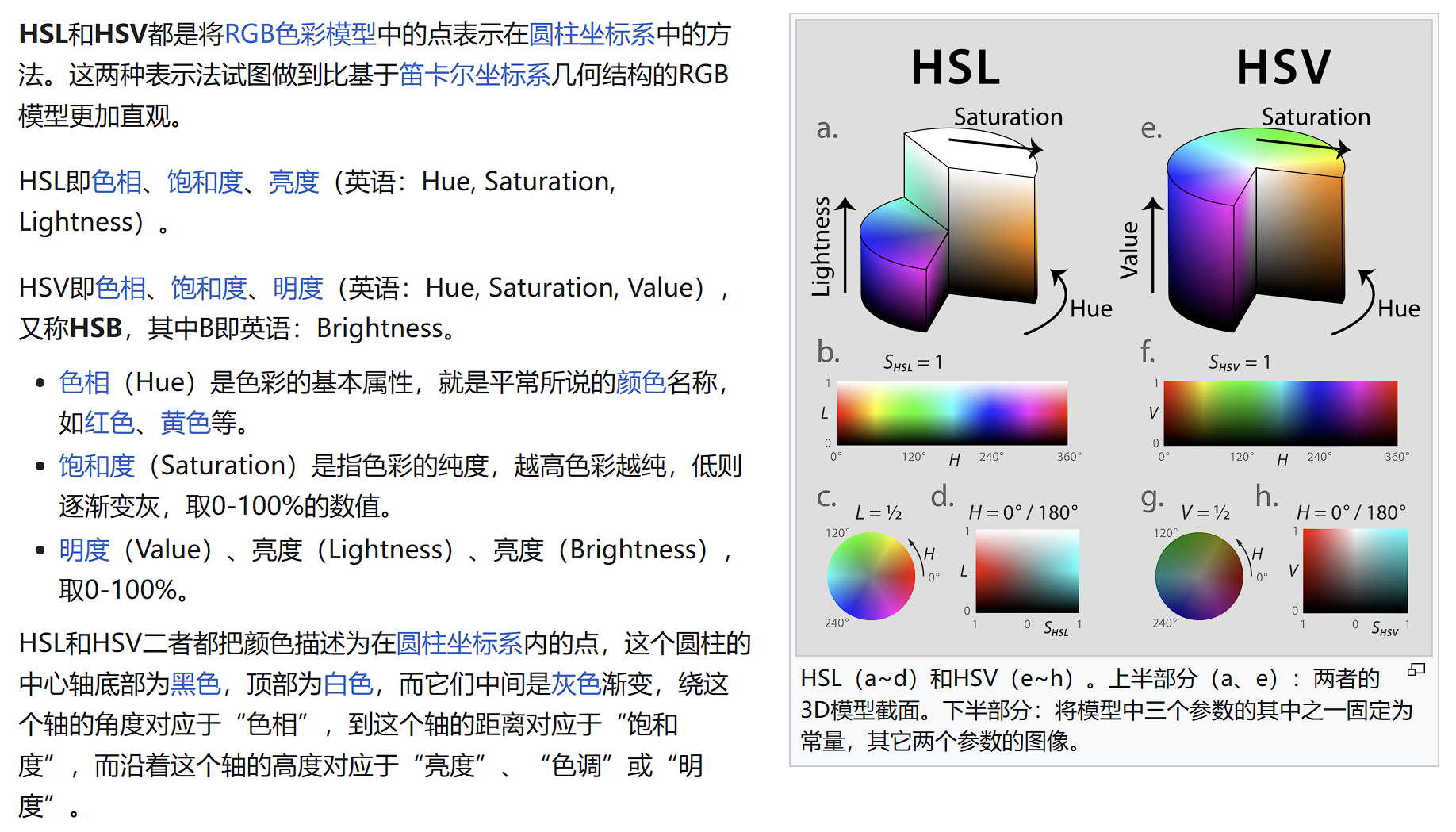
- HSV
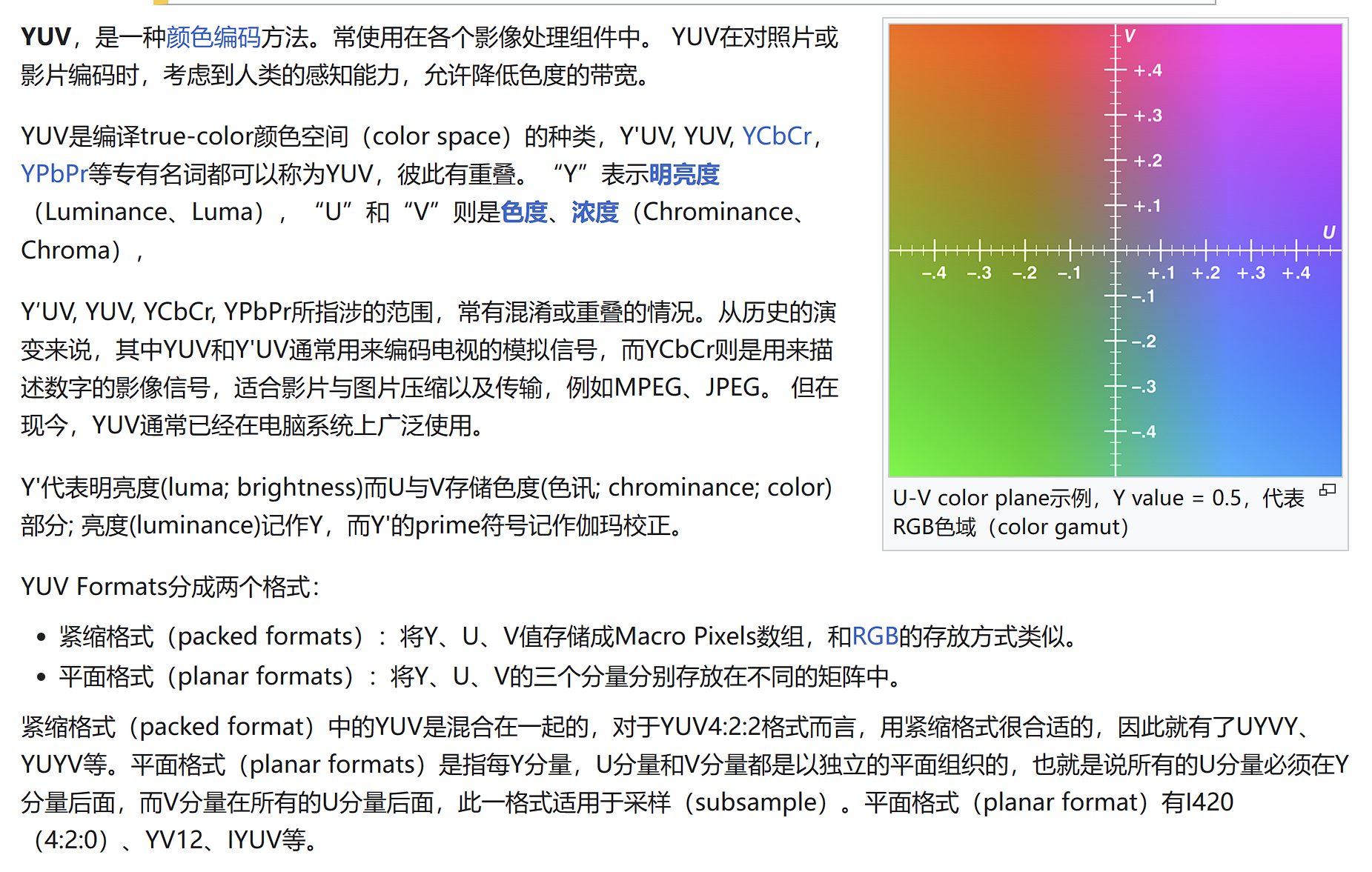
- YUV
- 灰度图
- OpenCV中默认读取彩色图像的颜色空间是BGR;
基本图形绘制
- 画点/圆
cv.circle(img,(x,y),radius,color) - 画线
cv.line(img,(x1,y1),(x2,y2),color) - 画矩形
cv.rectangle(img,(x1,y1),(x2,y2),color) - 文字
cv.putText(img,text,(x,y),fontFace,fontScale,color)
图像轮廓查找

灰度变换与直方图修正
点运算
- 点运算指对图像中每个像素进行相同且独立的运算;
- 点运算分为灰度变换和直方图修正两种方法;
- 显示标定,某些显示设备有特定的优选灰度范围;
灰度变换
- 若曝光不足/曝光过度,导致图像对比度过小、输入图像的亮度分量的动态范围较小,可以通过灰度变化来提高图像的对比度,突出感兴趣的特征/抑制无效信息;
- 彩色图像灰度化
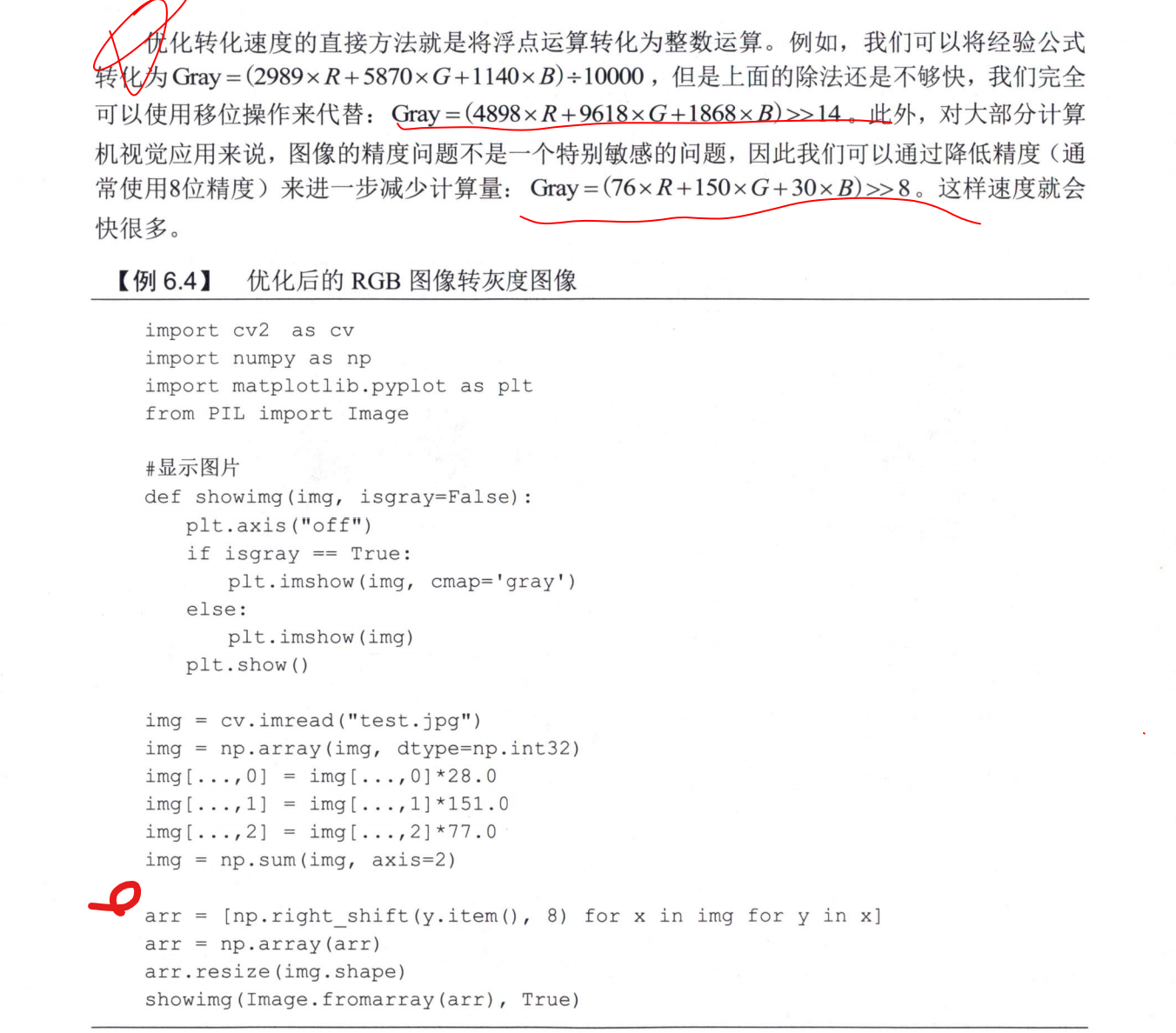
- 加权平均值法

- 最大值法
D=Max(B,G,R) - 平均值法
D=Avg(B,G,R)
- 加权平均值法
- 灰度线性变化
- 在低曝/过曝情况下,图像的灰度局限在小范围内,采用线性变化可以对指定范围的灰度做拉伸;
- 分段线性变化将灰度分为多个范围,对感兴趣的特征进行增强;
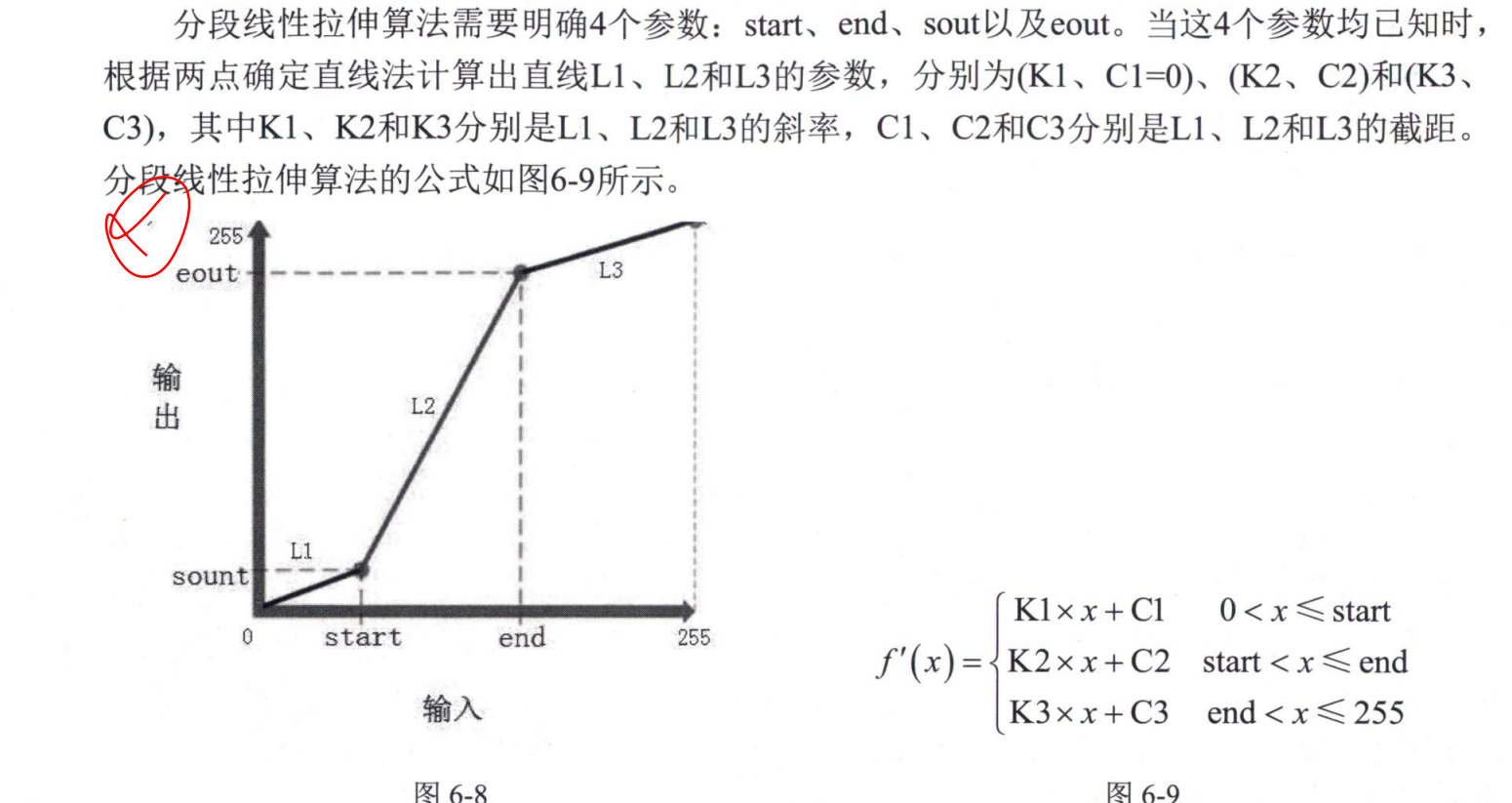
- 分段线性需要确认分段点,可以考虑自适应最小误差法、多尺度逼近法、恒增强率
- 非线性变换
- 对数变换,能增强暗部细节

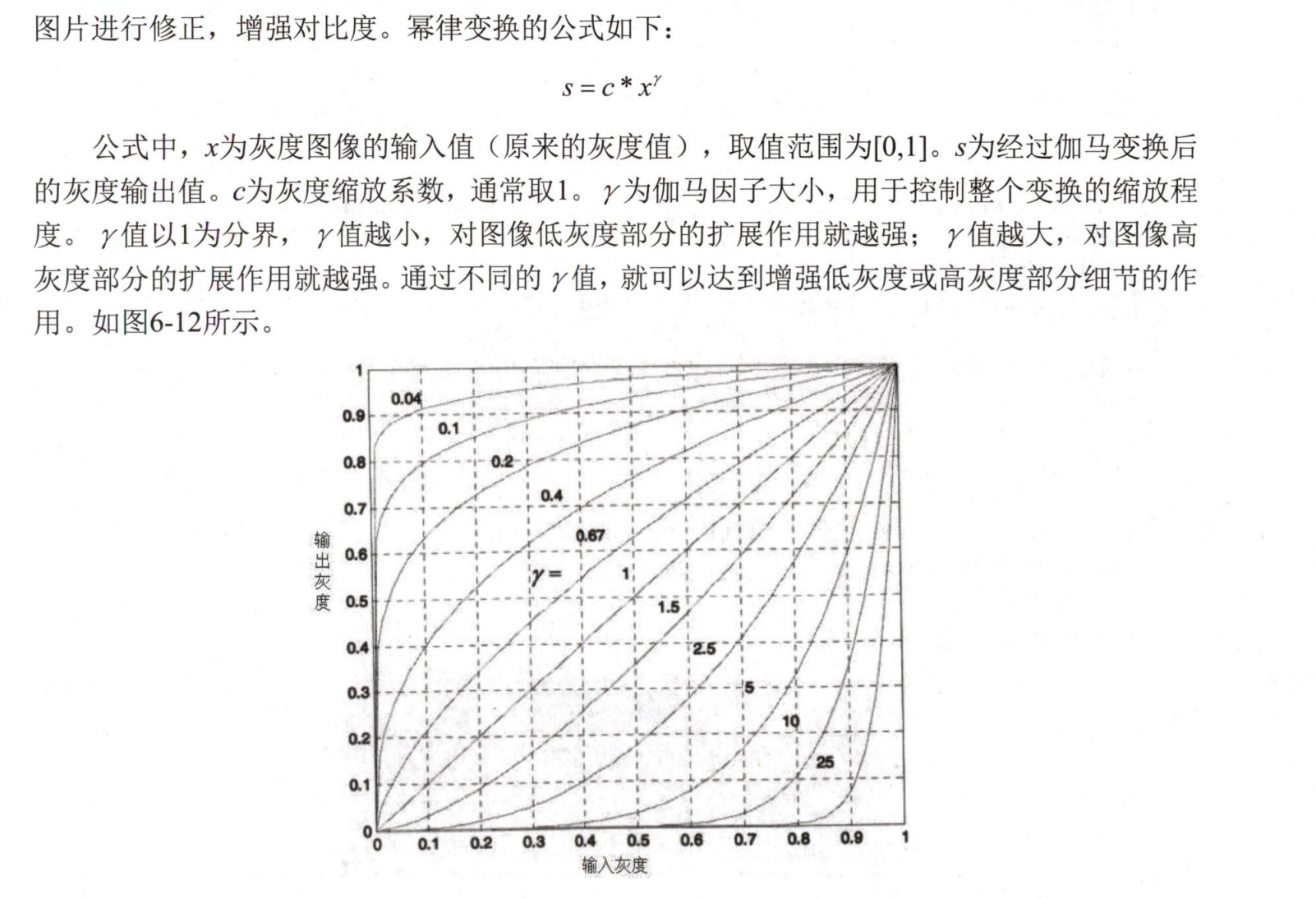
- 伽马变换,多用于高灰度和低灰度的增强
- 对数变换,能增强暗部细节
直方图修正
- 直方图Histogram,就是描述图片中灰阶出现的次数/概率;
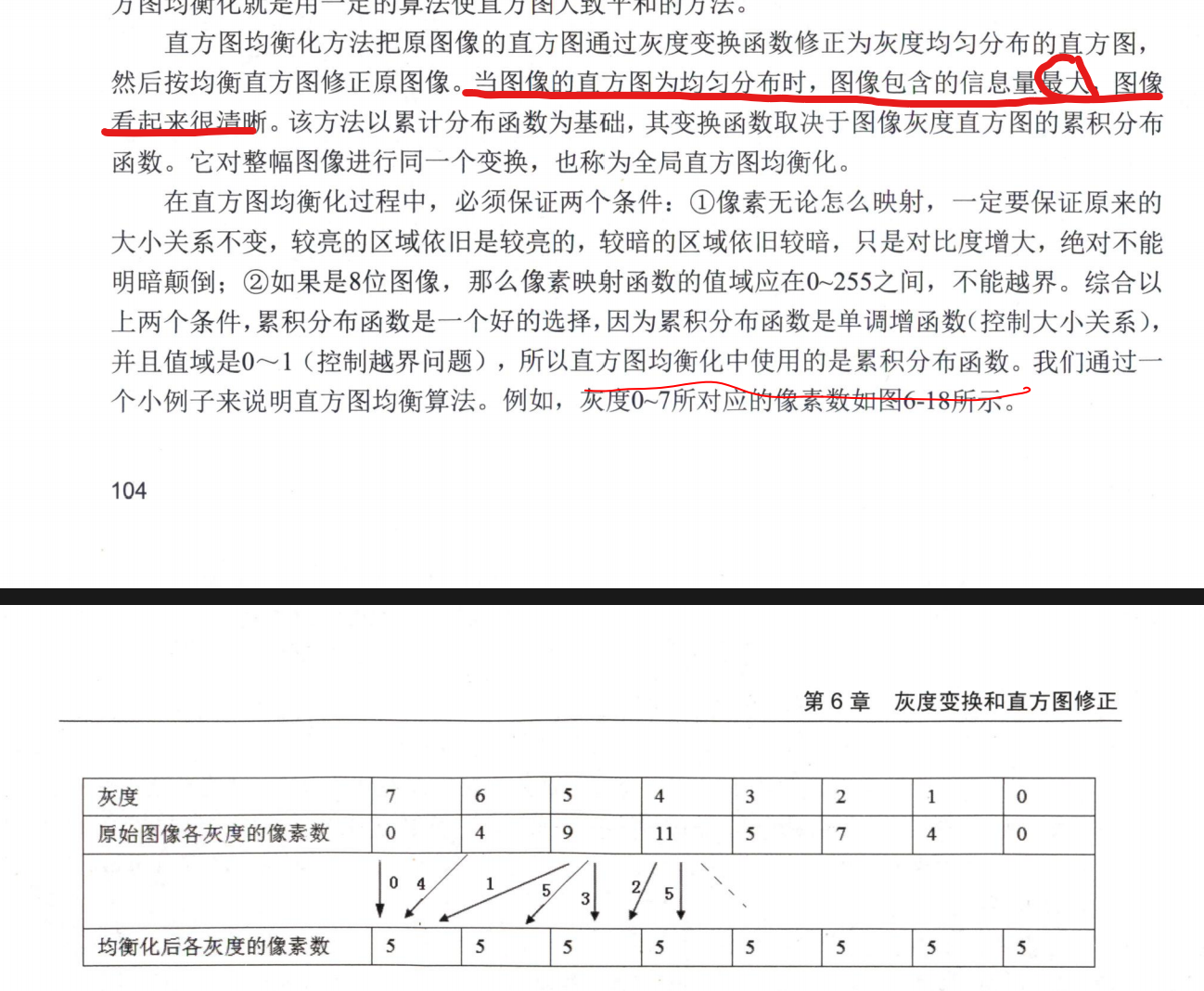
cv.calcHist(images,channels,mask,histSize,ranges)- 直方图均衡化
图像平滑
平滑的分类
- 频率域平滑
- 傅里叶变换,将图像从空间域转换到频率域;
- 傅里叶变换的逆变换,将图像从频率域转换到空间域;
- 高频噪声频谱,可以使用低通滤波器;
- 低频噪声频谱,可以使用高通滤波器;
- 空间域平滑
- 线性滤波与非线性滤波
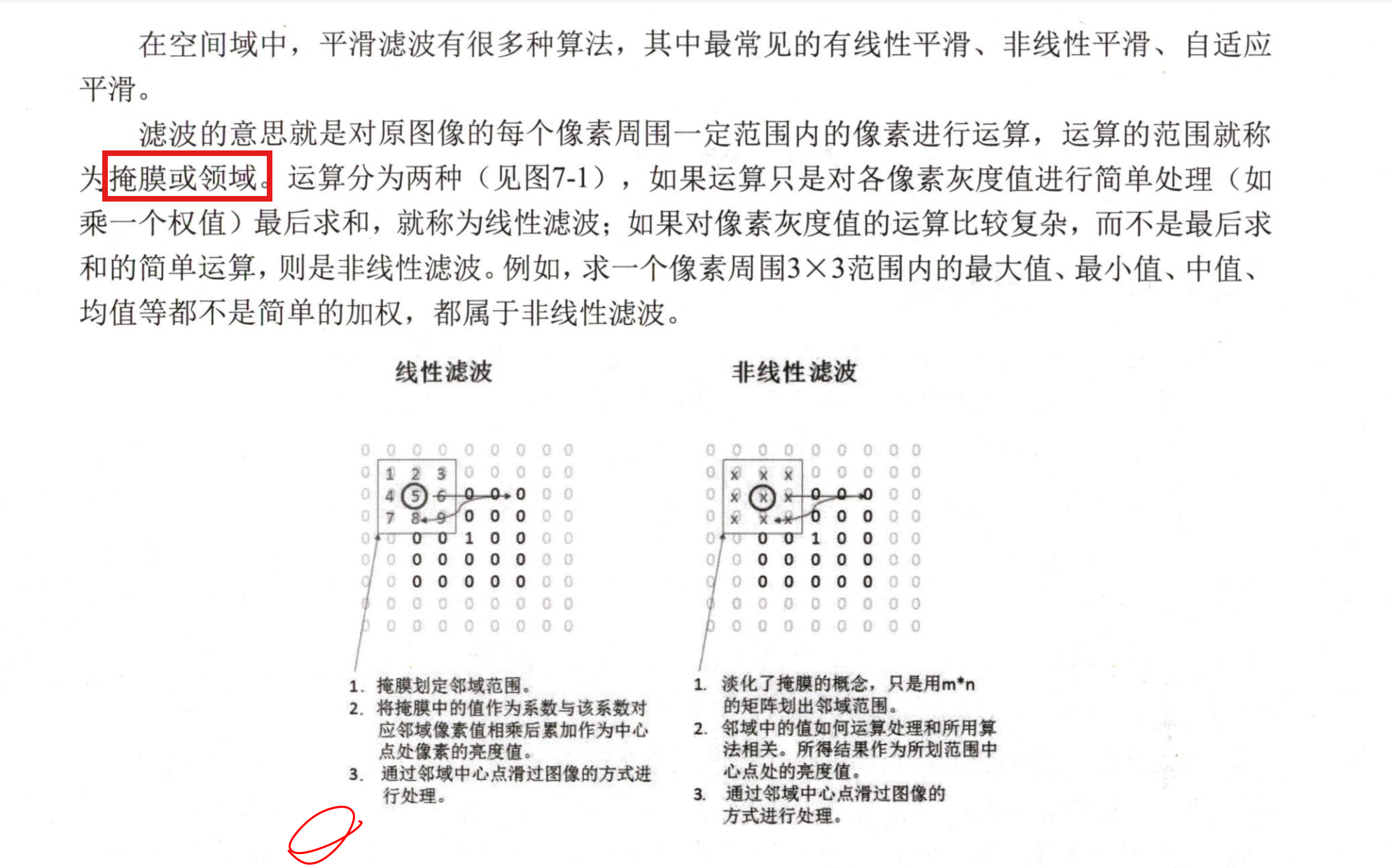
- 线性平滑可以降噪,但是模糊了边缘和细节;
- 非线性平滑可以消除孤立点噪声,但是模糊了边缘;
- 线性滤波与非线性滤波
- 线性滤波方法
- 归一化/均值滤波
cv.blur(src,ksize)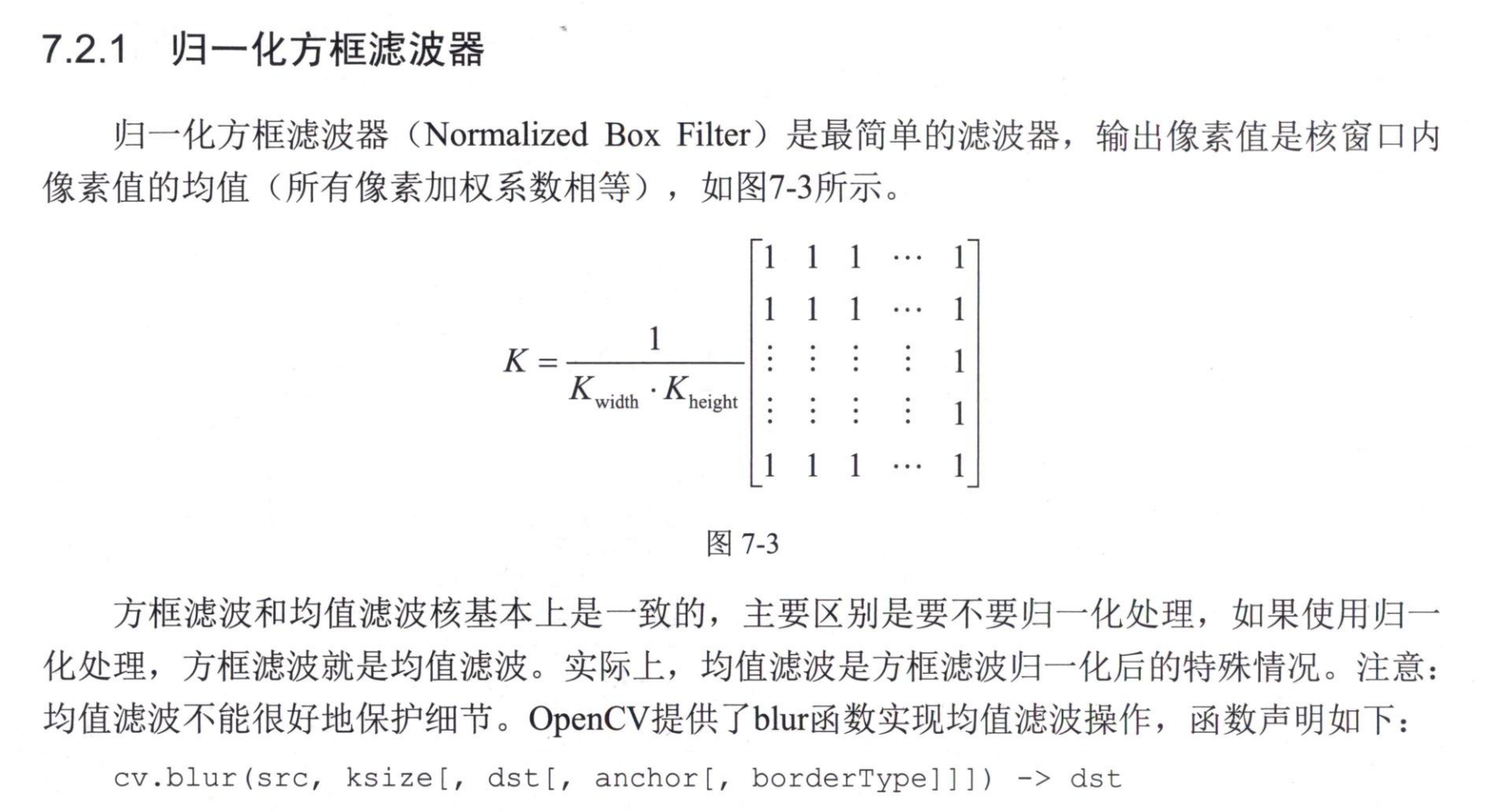
- 高斯滤波
cv.GaussianBlur(src,ksize,sigma)
- 高斯滤波是高斯核与图像卷积,对于服从正态分布的噪声,效果最好;
- 高斯模糊是通过低通滤波器实现的,可以去除图像中的高频噪声;
- 归一化/均值滤波
- 非线性滤波方法
- 中值滤波
cv.medianBlur(src,ksize)- size大于1且为奇数,默认为3*3;
- 对于椒盐噪声(随机出现的白点/黑点),中值滤波效果好;
- 会丢失图像的边缘信息,带来不必要的模糊;
- 双边滤波
cv.bilateralFilter(src,ksize,sigmaColor,sigmaSpace)- 双边滤波同时考虑空间距离和像素值差异,可以较好地保持边缘信息;
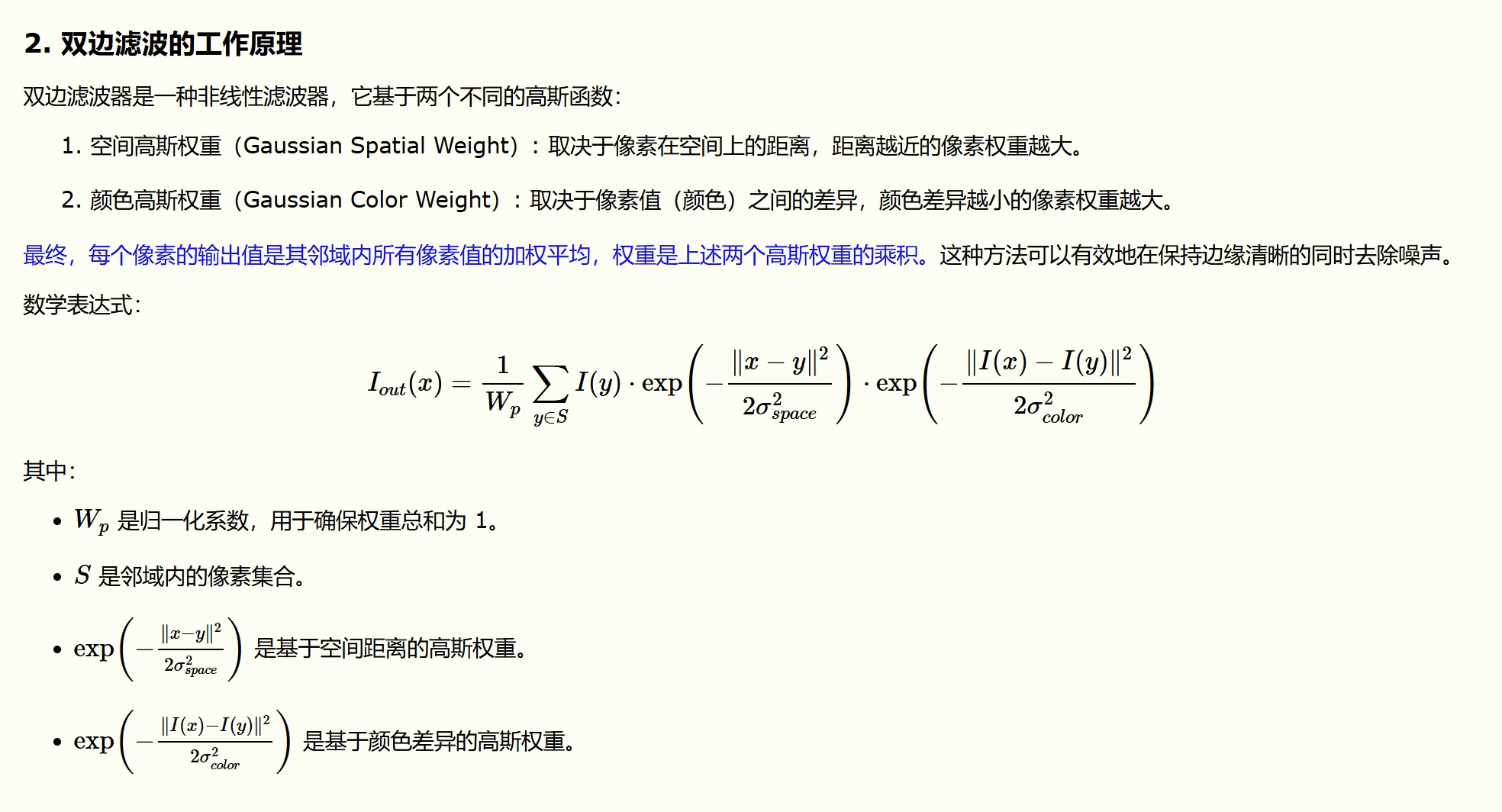
- 运算较慢,可以采用快速双边滤波、双边中值滤波;
- 通常用较小的sigmaColor和较大sigmaSpace,可以有效去噪并保持边缘;
- 中值滤波
几何变换
基础-齐次坐标变换
图像平移
图像旋转
仿射变换
图像缩放
图像边缘检测
边缘检测概述
- 边缘检测后大幅减少了图像的数据量,剔除了图像的大部分冗余信息,便于后续的特征提取和识别;
- 基于查找的边缘检测算法,通过寻找图像一阶导的最大/最小值来检测边缘,通常是把边界定位在梯度(灰度变化)最大的方向上;
- 基于零穿越的边缘检测算法,通过寻找图像二阶导数的零点来检测边缘,通常是Laplacian过零点/非线性差分表示的过零点;
- 锐度
acutance,边缘的对比度 - 图像锐化的意义
- 一般图像都处于低频部分,噪声和边缘处于高频部分;
- 原始图像在平滑降噪处理后一定程度上也模糊了边缘,平滑一般都是平均/积分运算;
- 因此可以通过积分逆运算(如微分)来锐化边缘;
- 锐化方法分为频域高通滤波和空域微分法;
- 图像边缘
- 边缘具备方向和幅度特征,是图像灰度变化剧烈的区域,即局部梯度较大的区域;
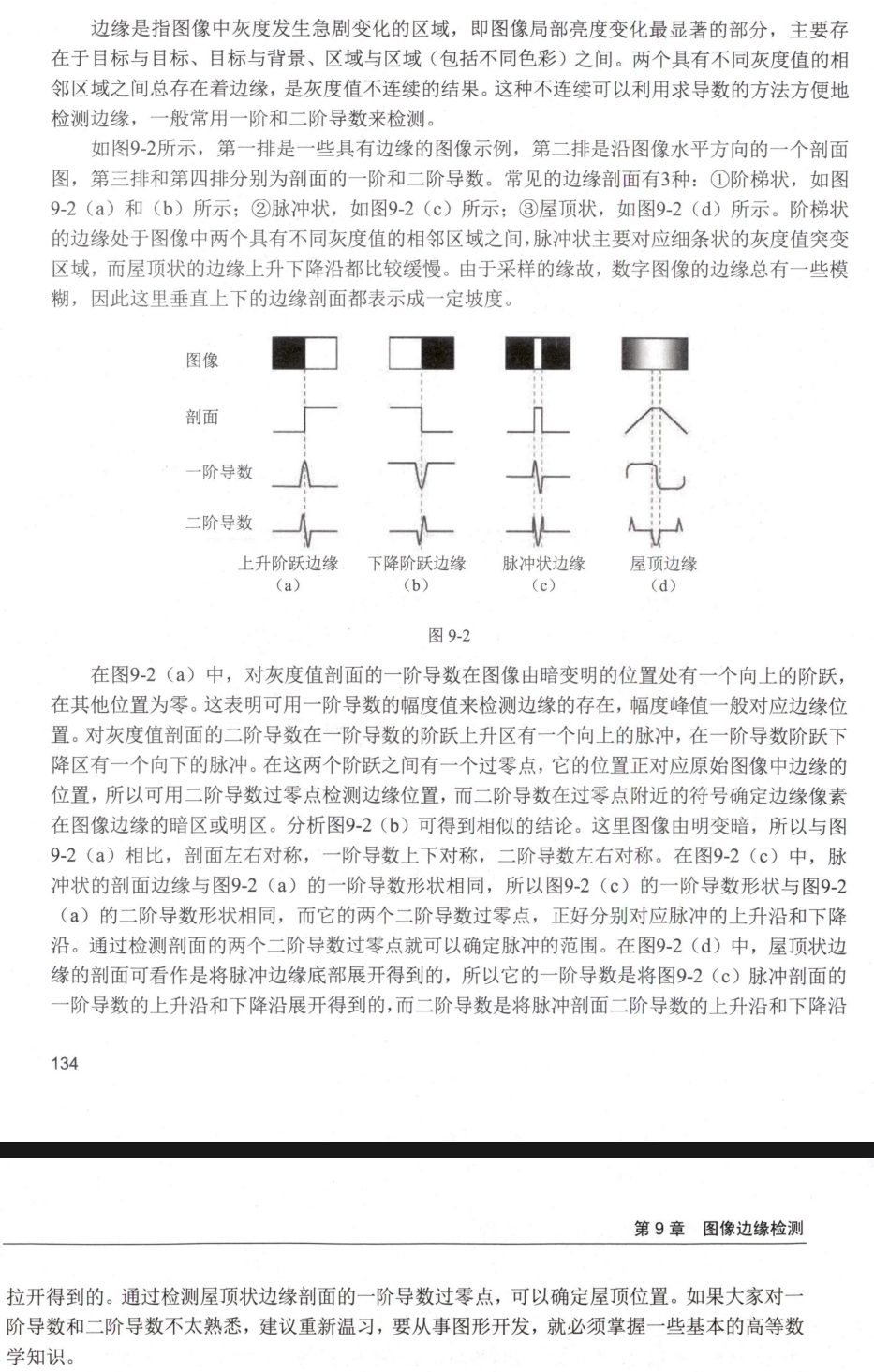
- 灰度有明显差异点,为阶跃性边缘,如轮廓线,其二阶导数在边缘处呈零交叉;
- 灰度从增大到减少点,为屋顶状边缘;
- 边缘分类和检测分类
梯度的数学定义
边缘检测的问题
- 噪声和边缘都是高频信号,噪声消除和边缘检测的矛盾
- 物理和光照影响,边缘发生在多尺度上,且多是斜坡阶跃边缘,定位误差大;
- 丢失有效边缘、定位误差、噪声当边缘
边缘检测思想
边缘检测步骤
计算机视觉 (【英】西蒙 J.D. 普林斯 著 苗启广 等 译)
概率概述
通用概念定义
随机变量 x
- 随机变量是定义在概率空间上的函数,其值可以是连续的也可以是离散的。
- 离散变量
概率和=1可以是有限的或无限; - 连续变量
积分=1可以是有限的或无限的;离散变量和连续变量的概率分布Pr(x)
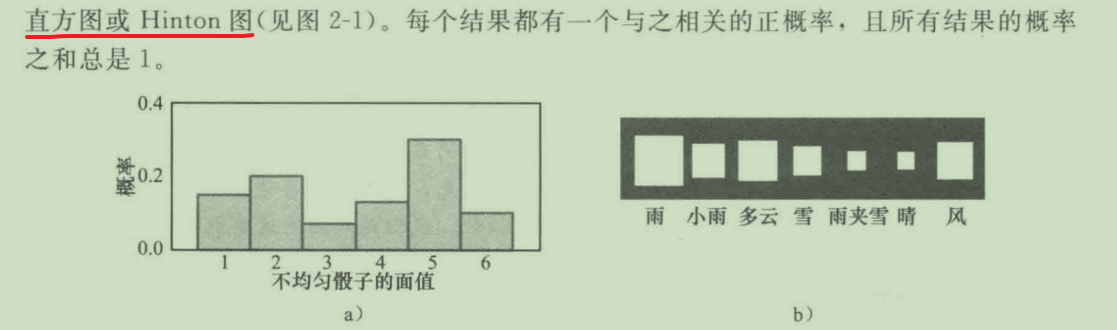
- 离散变量的概率分布 直方图
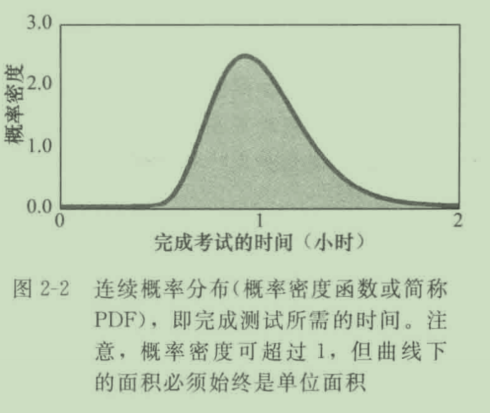
- 连续变量概率分布 概率密度函数(PDF)
联合概率分布 Pr(x,y)
- 任意多元变量的联合概率分布,Pr(x,y,z,…)
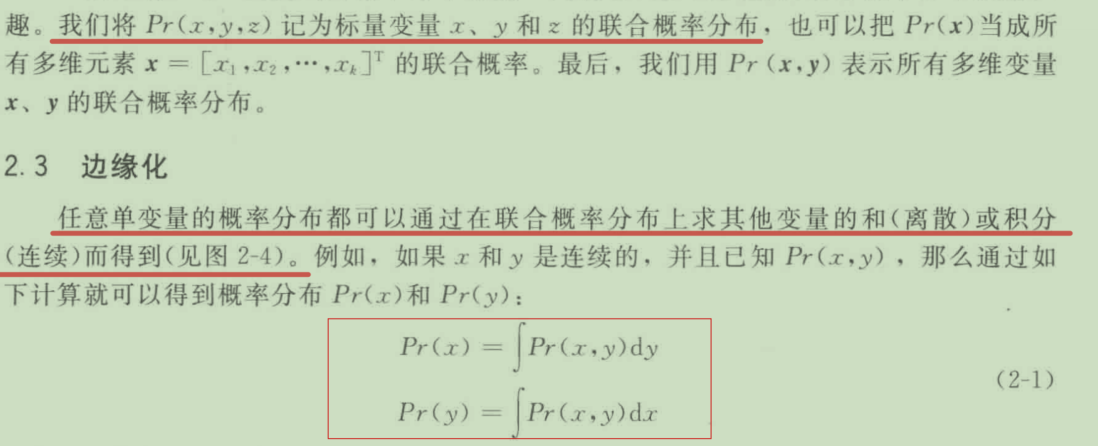
边缘化
任意单变量的概率分布都可以通过联合概率分布求其他变量的和(离散)或积分(连续)而得到;- 其他变量的积分/求和过程称为边缘化(Marginalization);

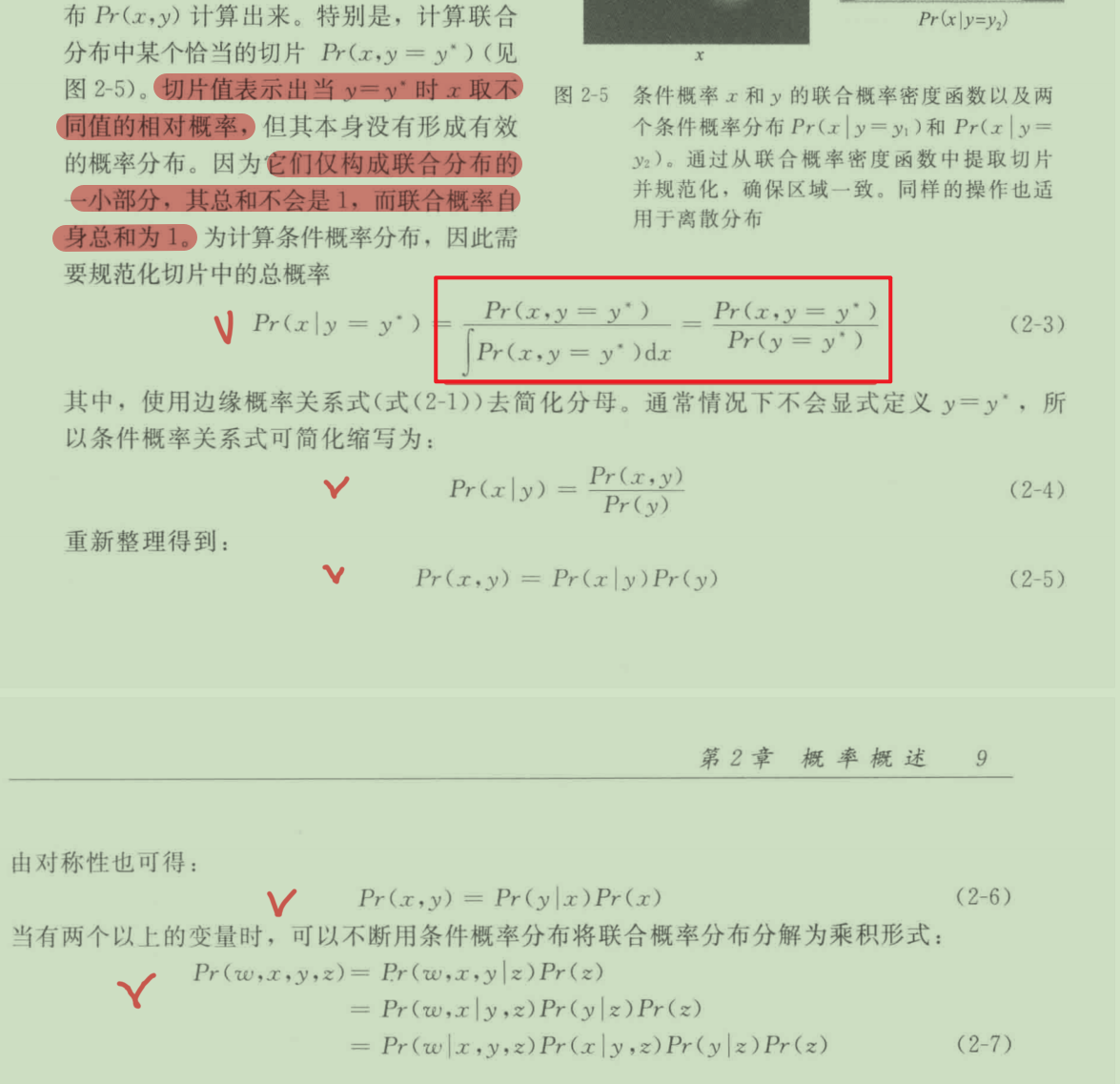
条件概率分布 Pr(x|y)
- 给定
| y=10其他变量的情况下,一个变量的概率分布; - 公式:Pr(x|y)=Pr(x,y)/Pr(y)
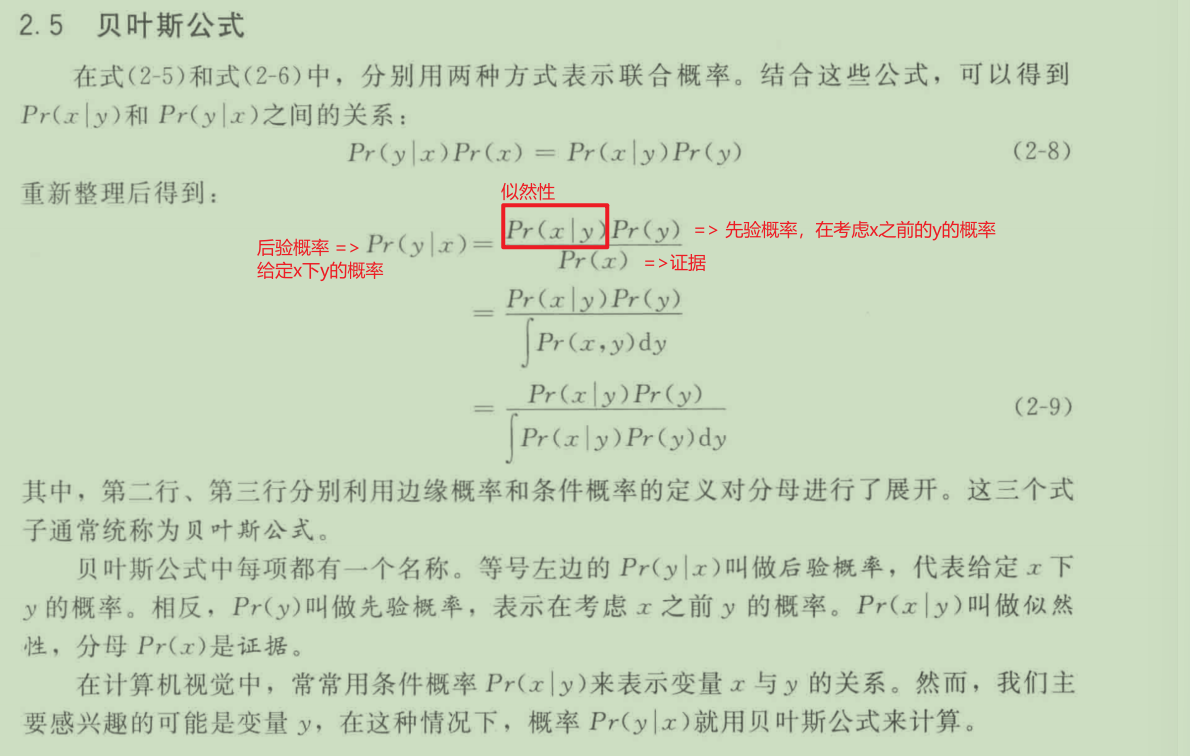
贝叶斯公式
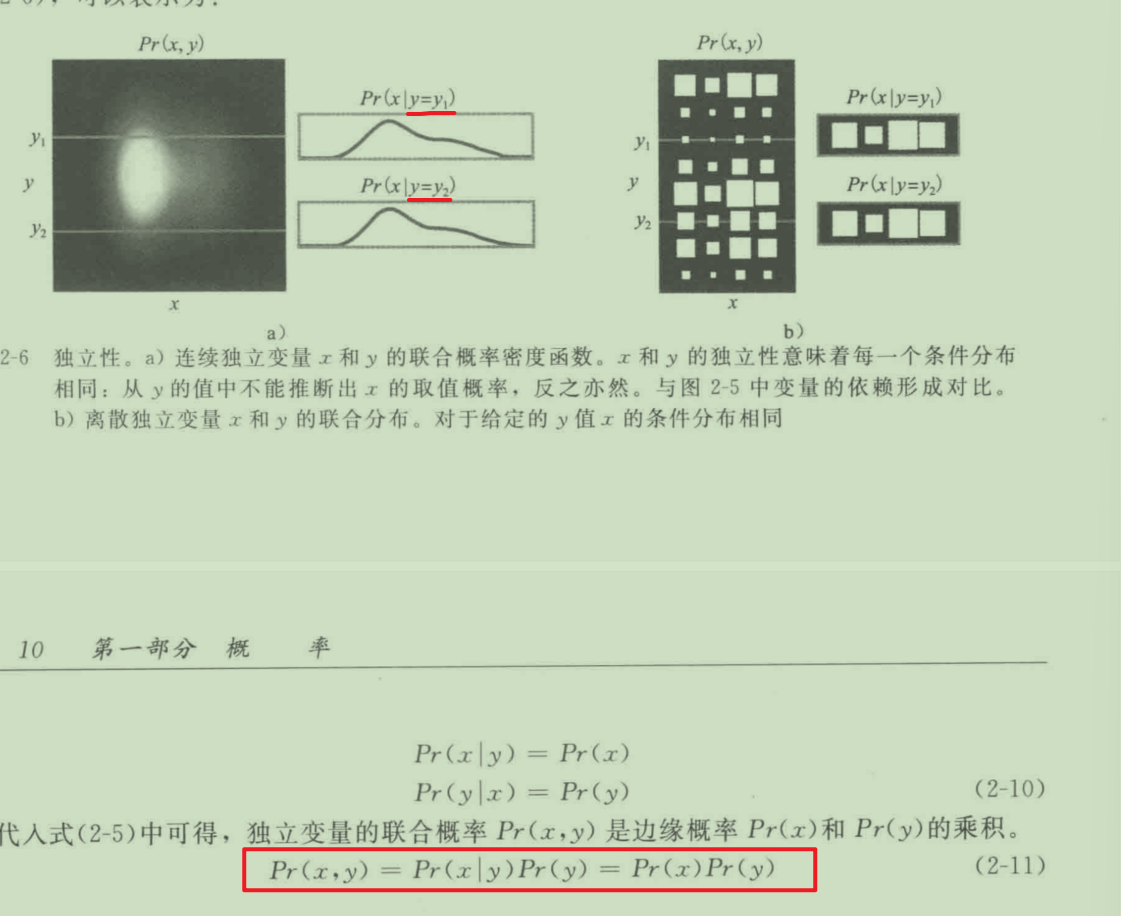
独立性
- 独立:从变量x不能获得变量y的任何信息,反之亦然;
- 两个变量独立,则它们的联合概率分布等于各自的概率乘积;
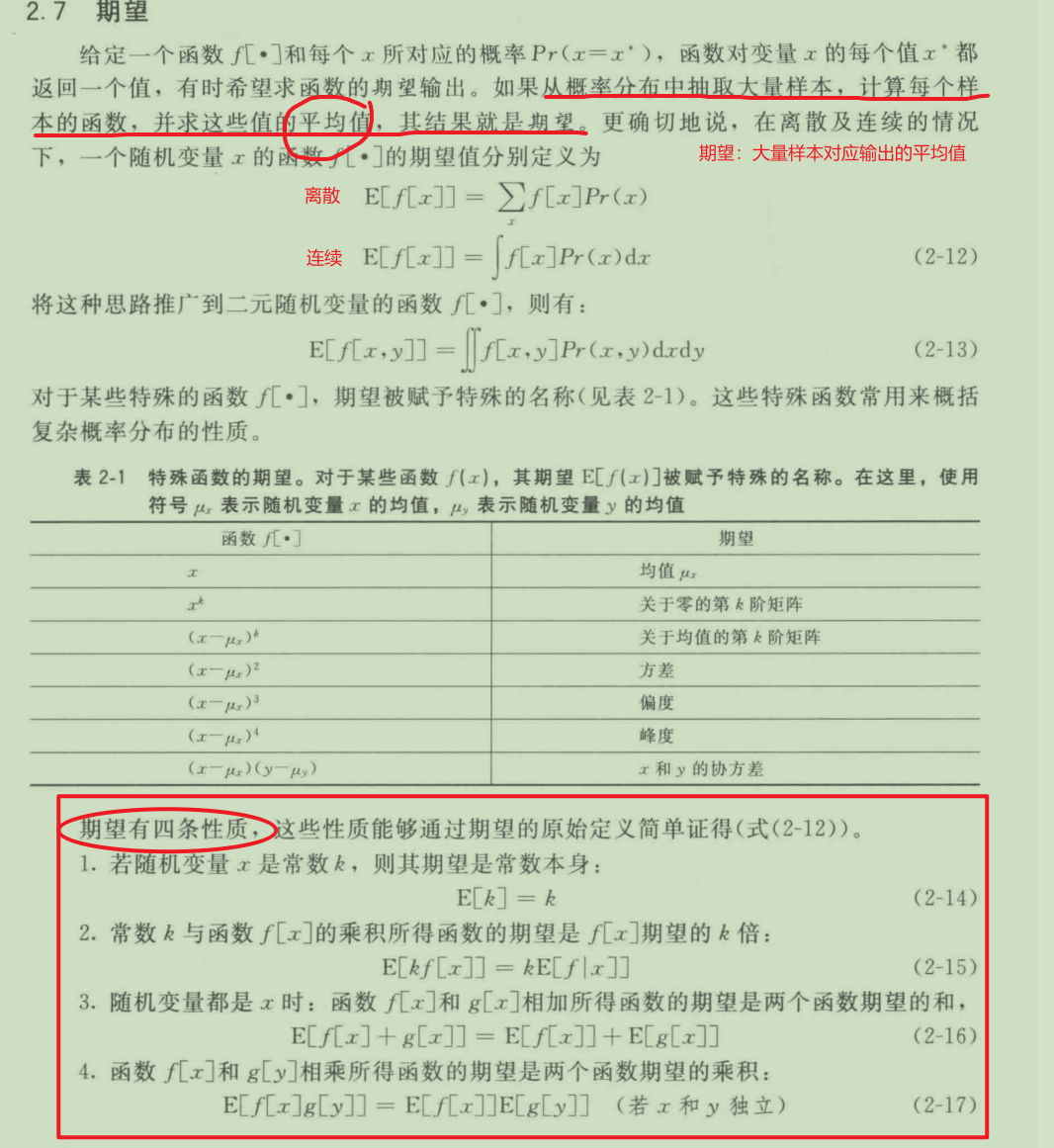
期望
- 期望:大量样本x*对应的函数F(x)输出结果之和的平均值;
习题练习


常用概率分布
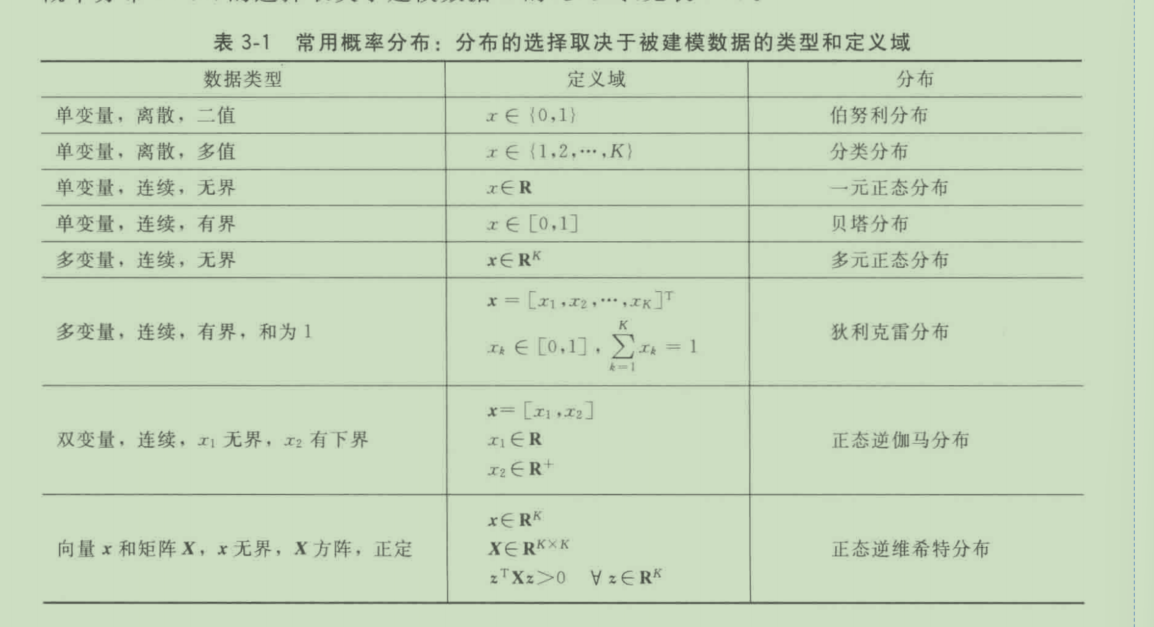
介绍
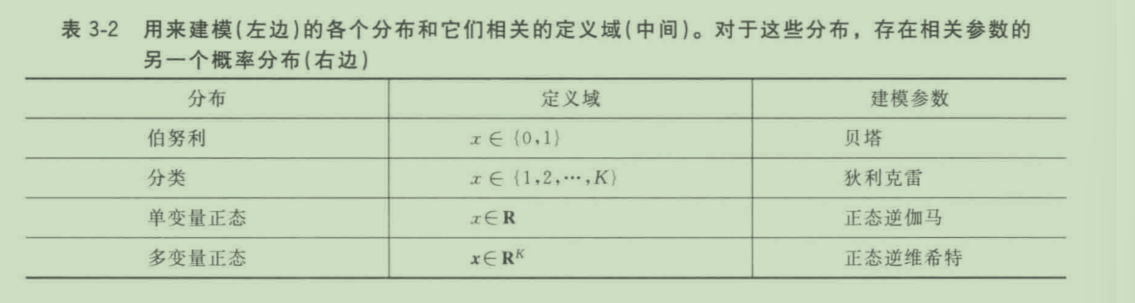
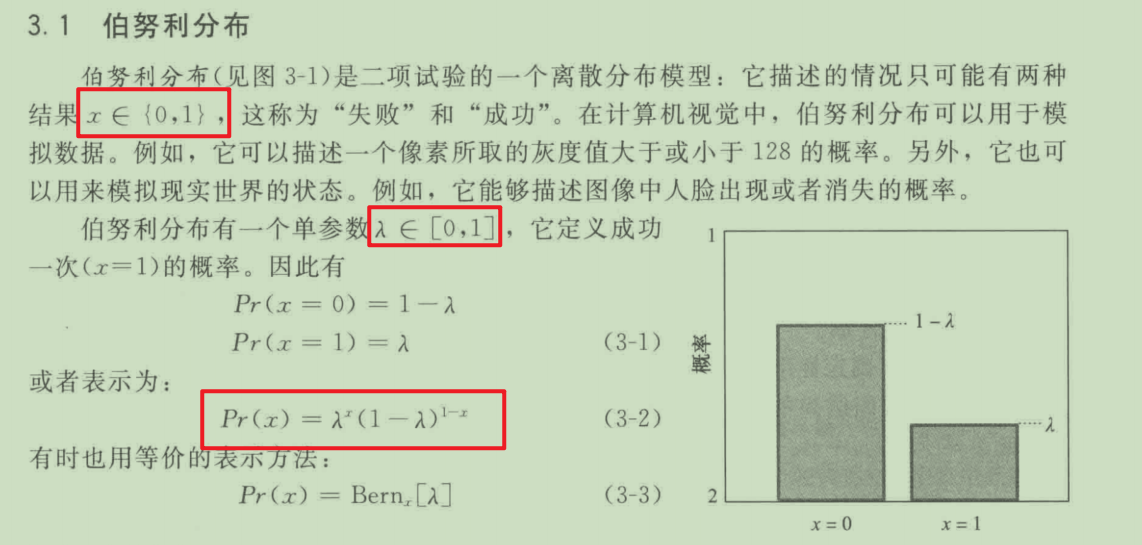
伯努利分布
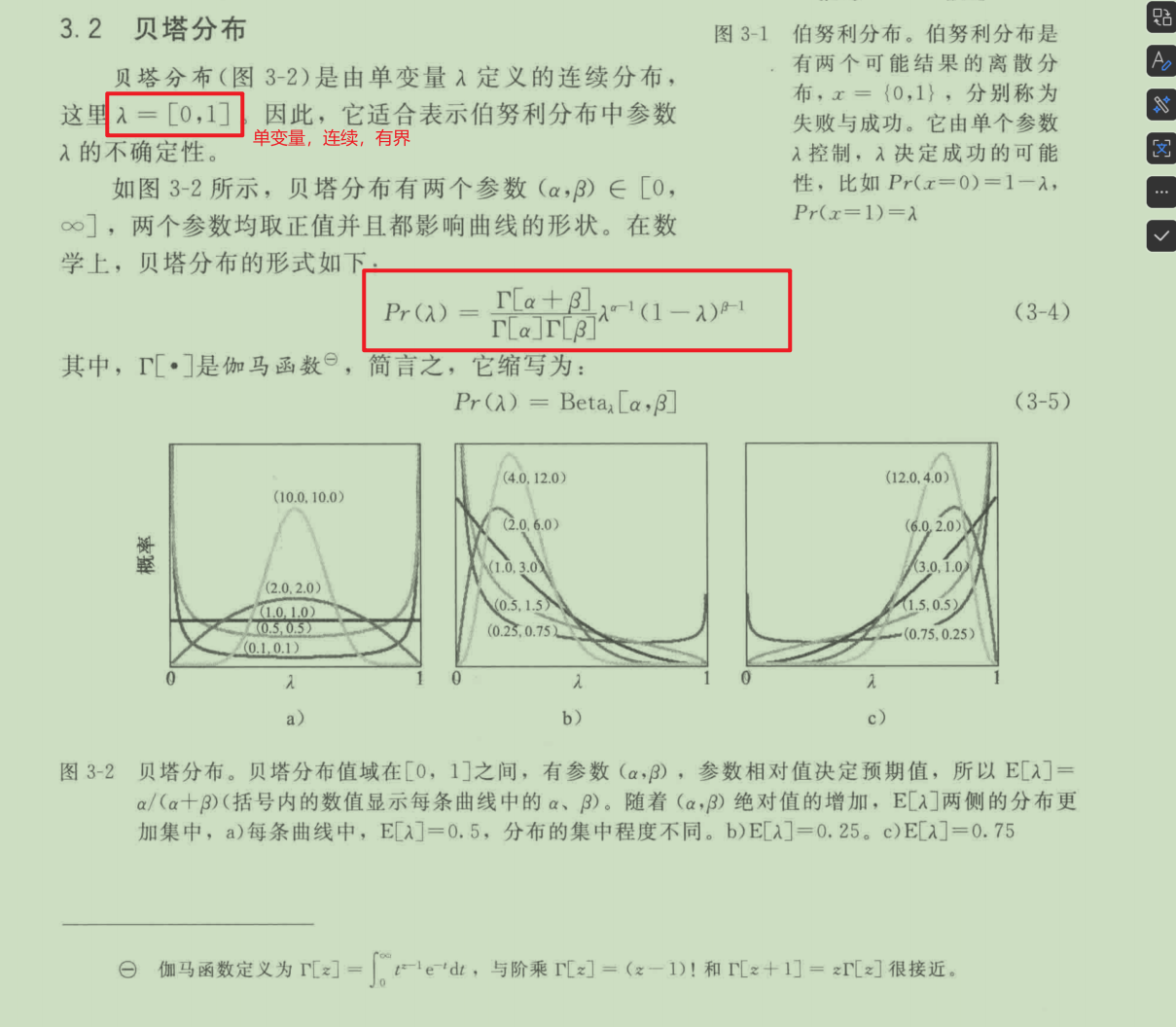
贝塔分布
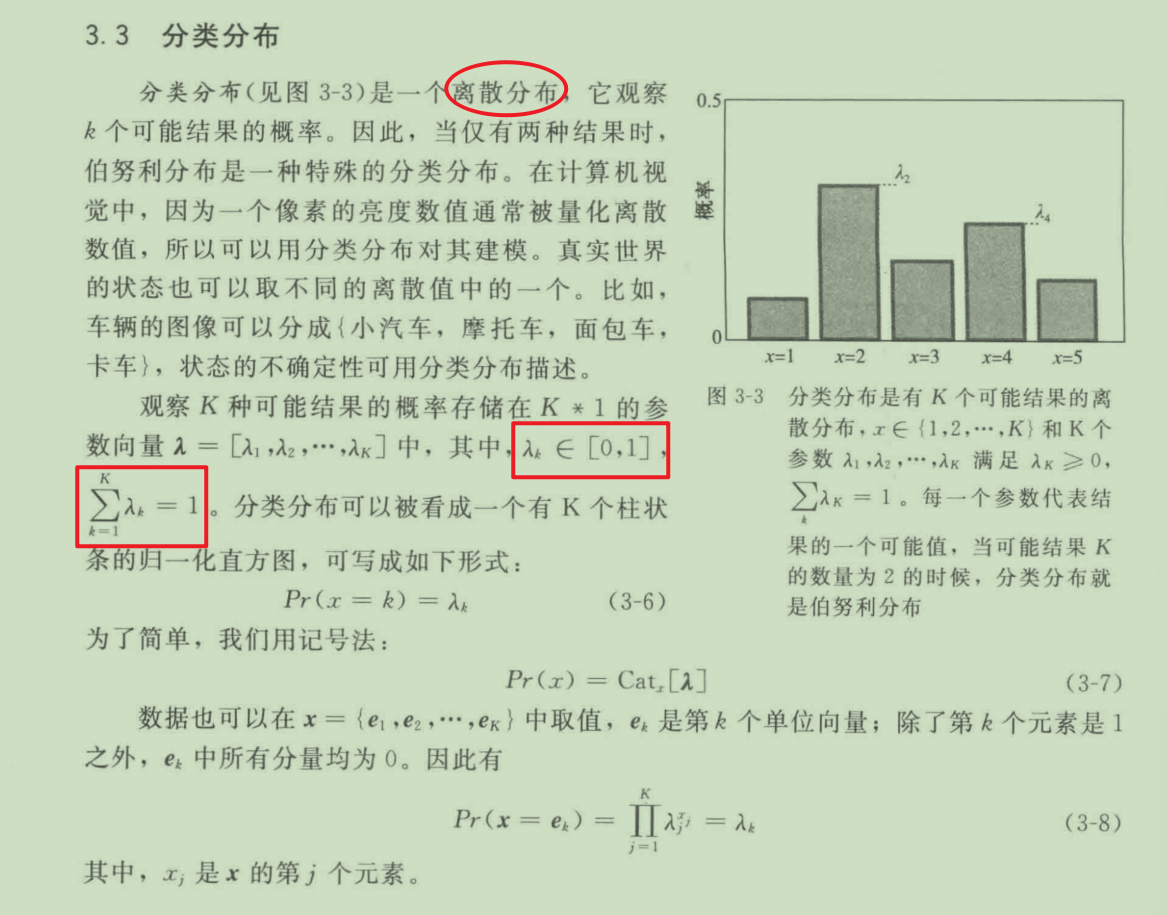
分类分布
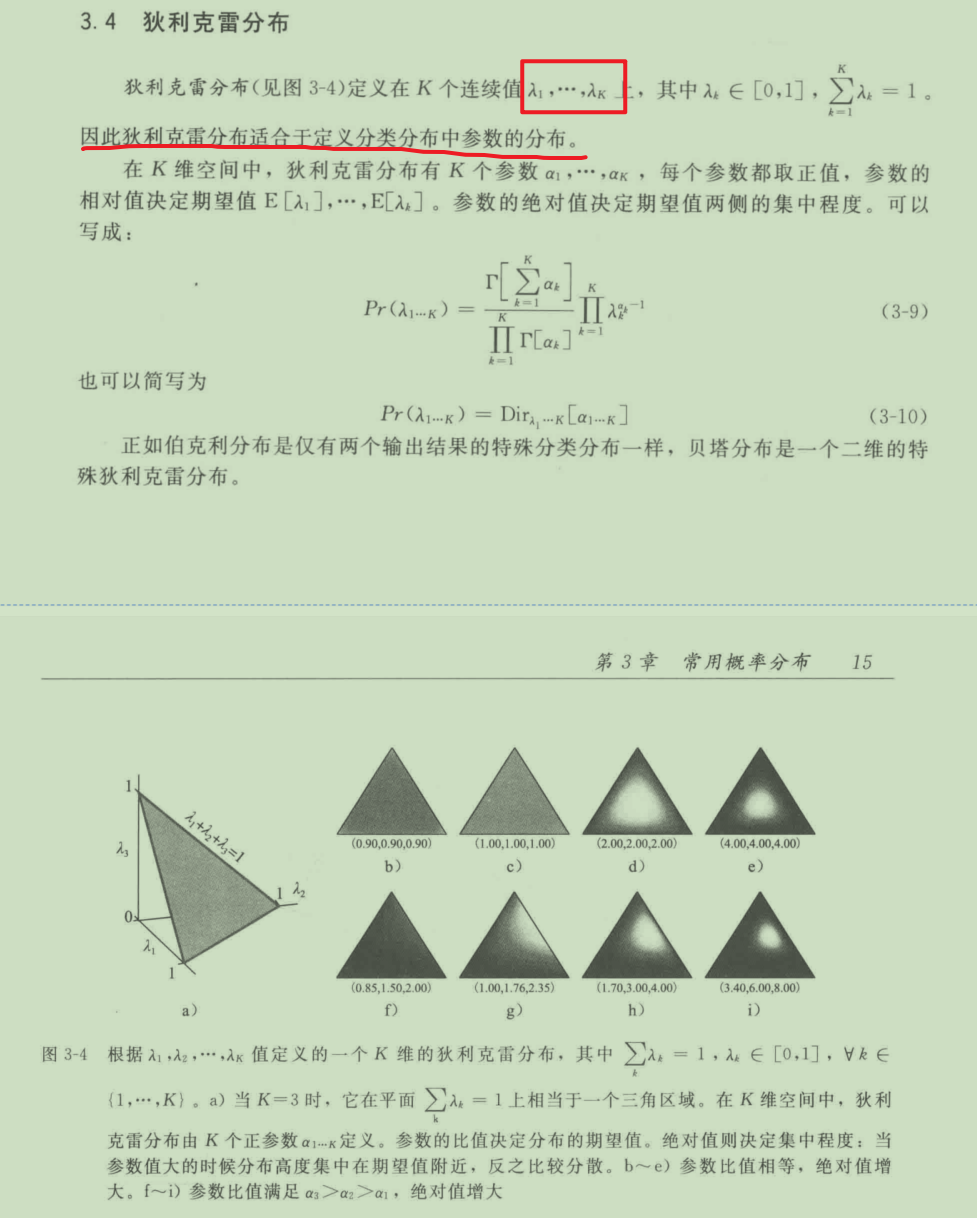
迪利克雷分布
 、
、
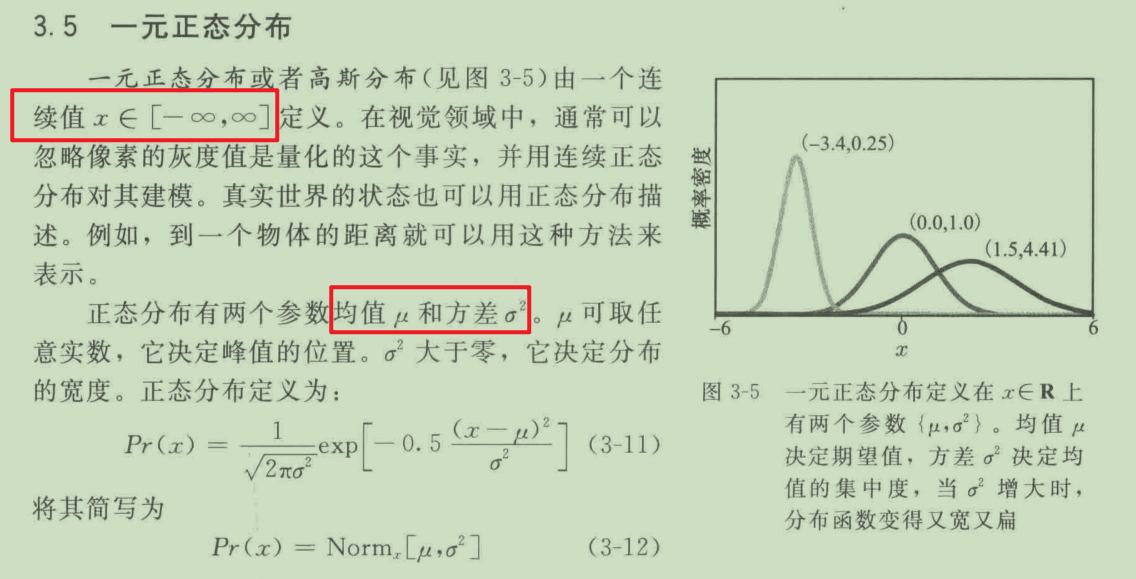
一元正态分布
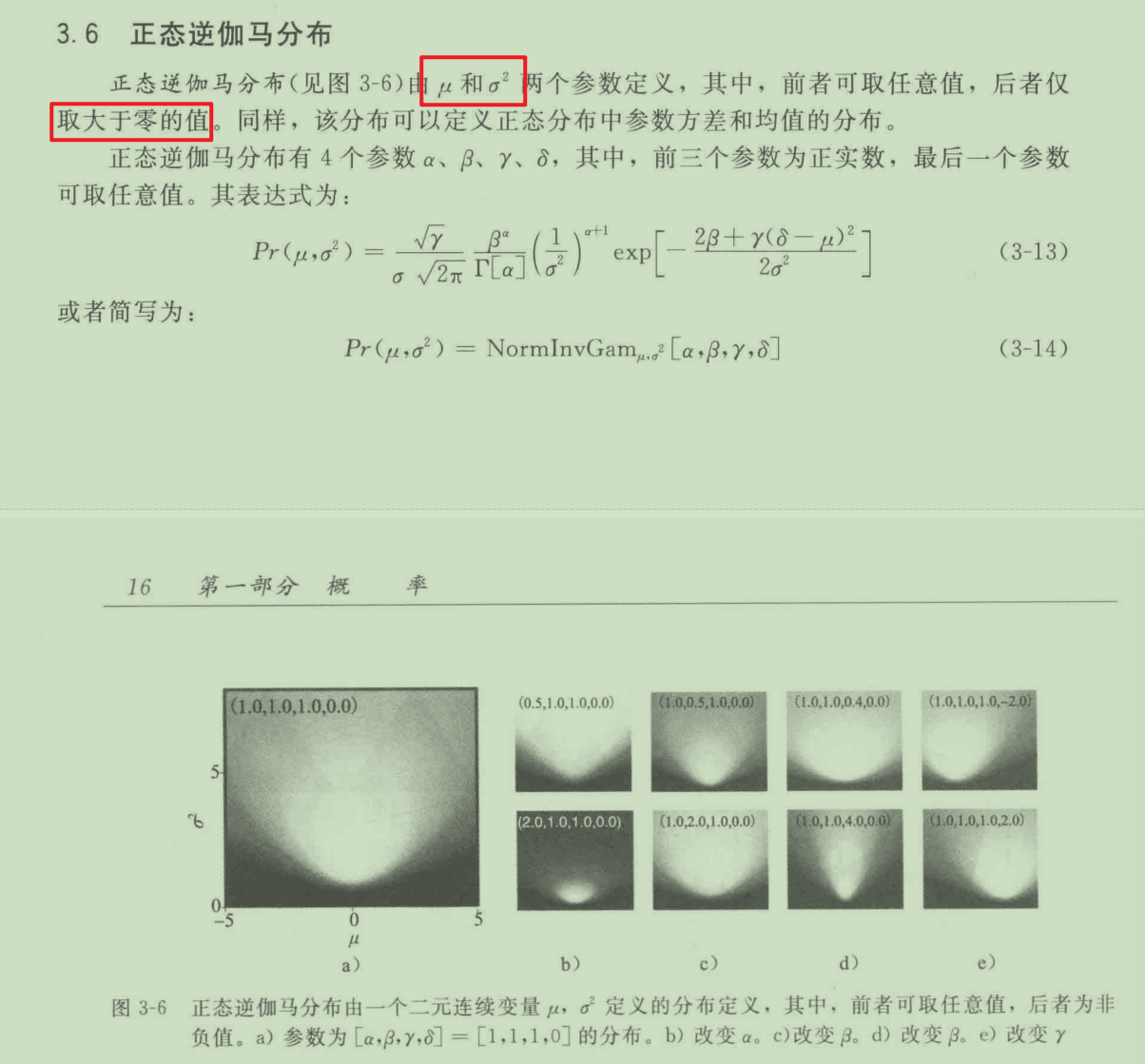
正态逆伽马分布
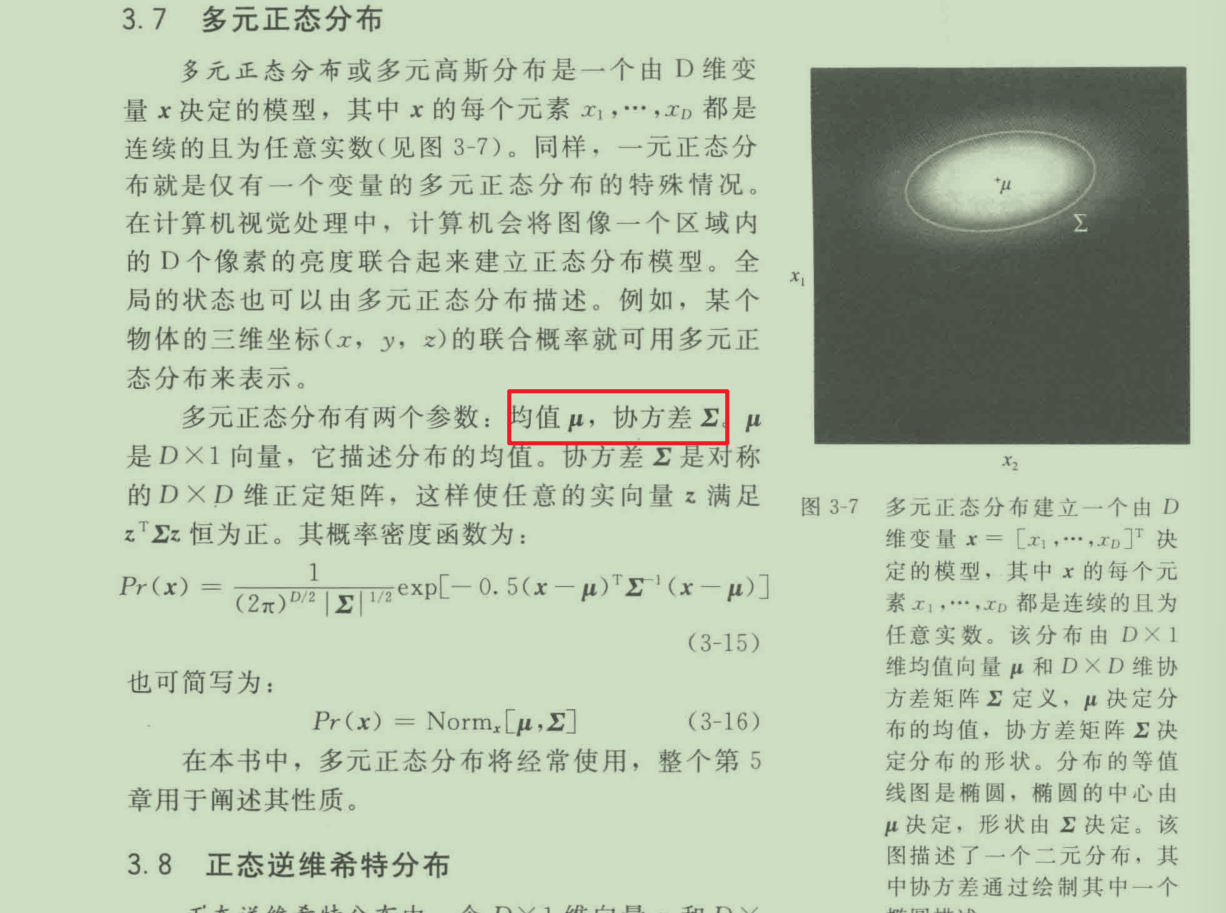
多元正态分布
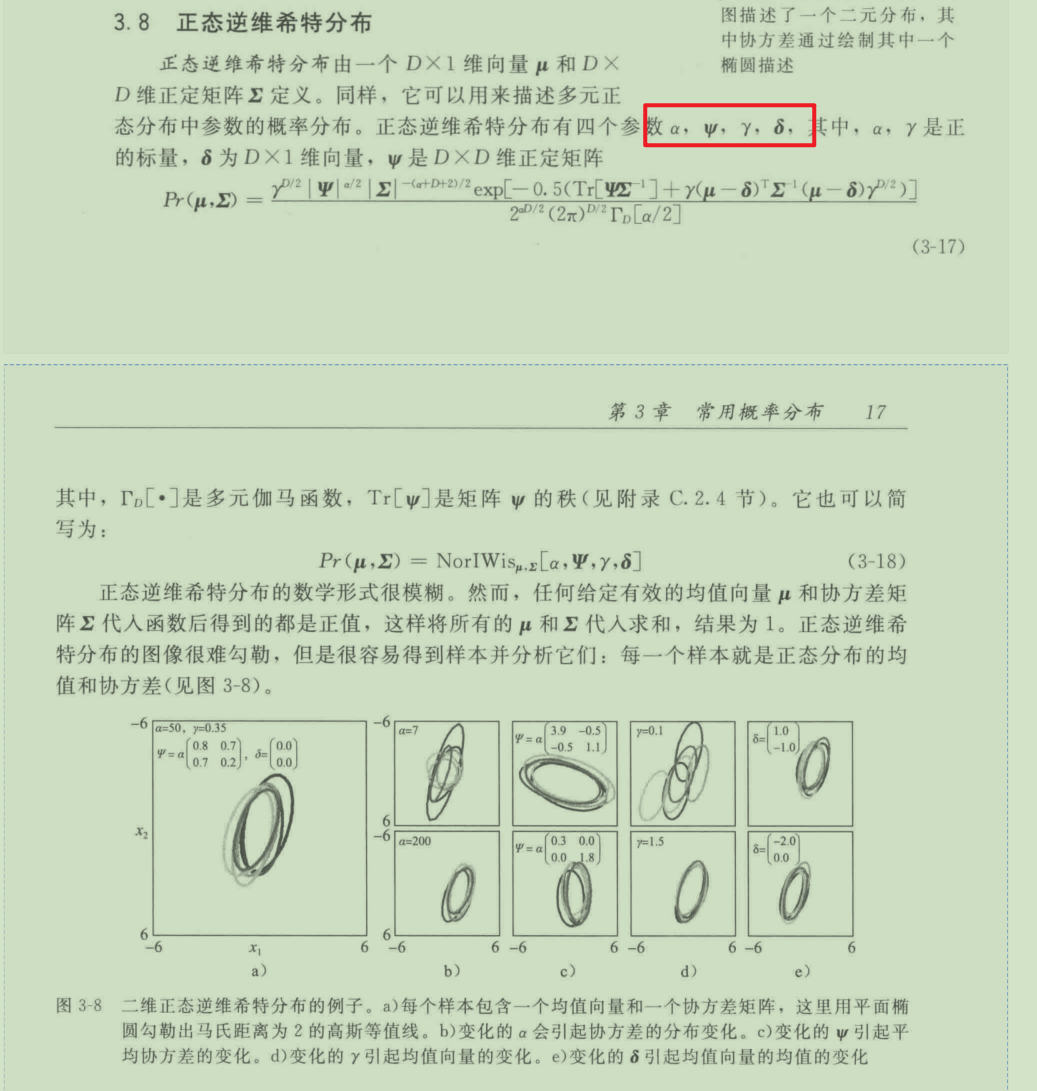
正态逆维希特分布
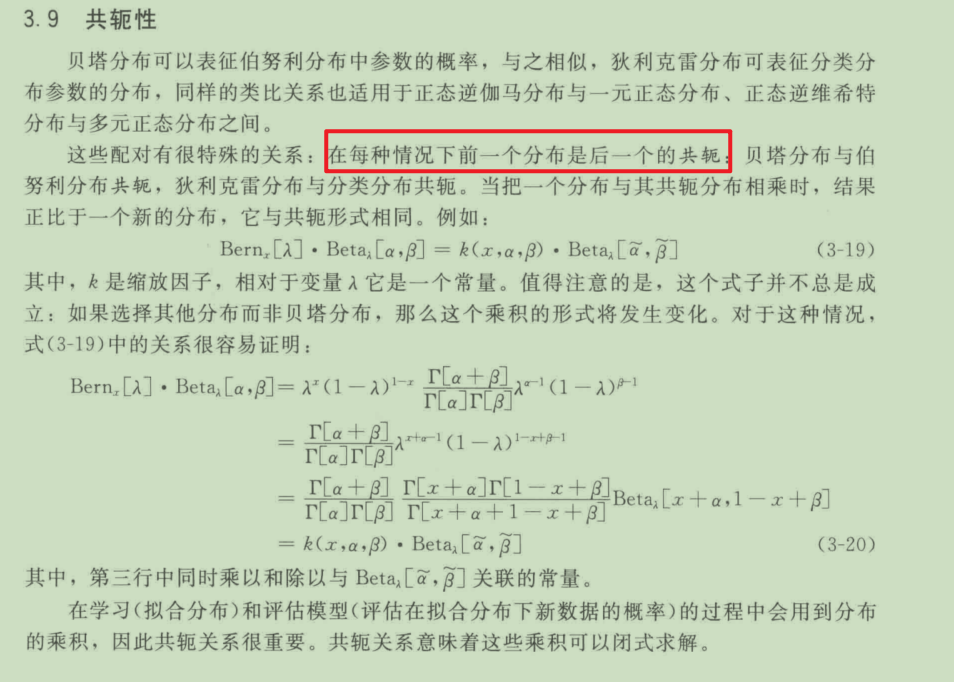
共轭性